Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!

 Error in Script "NaughtyInspector.cs". What can I do?
Error in Script "NaughtyInspector.cs". What can I do?
Hello,
suddenly after updating from 2022.13 to 2022.15 in console appears the following error messages:
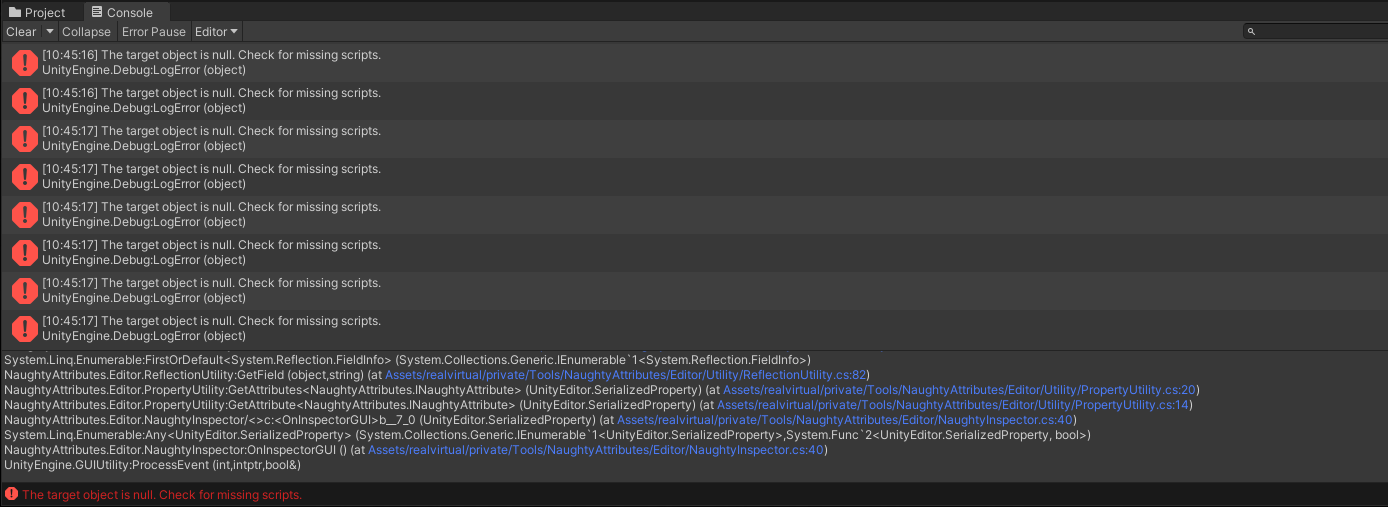
What can I do to find out where the problem is?
I am not 100% sure if it's exactly after the update BC I also did some own changes.
Drag and drop MUs by mouse navigation in game mode
Hello,
is there a easy way or can somebody provide suggestions how to move MUs in game mode with mouse navigation same as possible in scene view?

 About device interface interconnection
About device interface interconnection
在一些项目中,不允许甲方使用信号采集工具直接访问PLC,而是通过甲方的设备管理平台访问WEBAPI接口。在 realvirtual.io 中,有没有方便的方法来进行这种连接?

Question was (translated by Deepl):
In some projects, Party A is not allowed to access the PLC directly using the signal acquisition tool, but accesses the WEBAPI interface through Party A's device management platform. Is there a convenient way to make this connection in realvirtual.io?
You would need to implement a custom interface based on the WebApi specification
SnapPoint.OnStart()': no suitable method found to override
Assets\realvirtual\Professional\SnapPoints\private\SnapPoint.cs(37,33): Assets\realvirtual\ professional \ snappoints \private\ snappoint.cs error CS0115: 'SnapPoint.OnStart()': no suitable method found to override
Issue is solved with newest 2022.16 release. Please use 2022.16 Professional and 2022.16 Simulation together. On Problems when updating please also consider this:
 plugin disappeared.
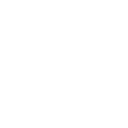
plugin disappeared.
I purchased and installed the realvirtual.io plugin in Unity. Initially, everything worked fine, but after a few days, when I restarted Unity, all content related to realvirtual.io reported errors, and the toolbar options related to the plugin disappeared.

S7PLCSIM Advance connection problem
Hello Sir,
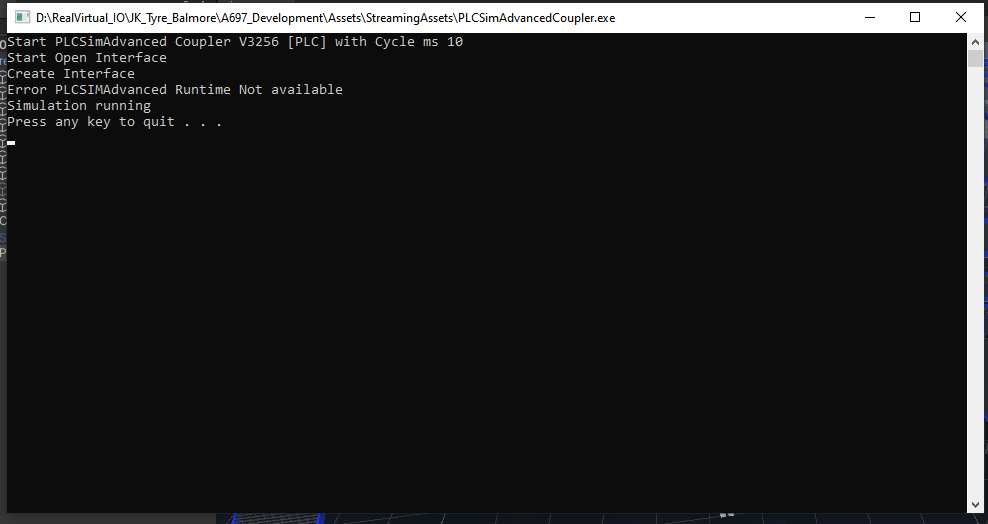
Currently I have added the PLC Advance interface to my project. Also successfully to run the PLCSim advancedCoupler.exe. But after that, it shows that PLCSIMAdvance runtime not available. Can you please help on this

realvirtual.io Digital Twin Assistant update
Hi, thomos, please update assistant when i try to fix some problems its not using recent knowdge.
thanks
combining MUs
Hello,
is there a way to combine two or more MUs ?
for example: MU1 (main part) is on a transport surface. At some point it stops and MU2 (smaller part) should be fixed onto MU1. They continue moving on transport surface together without falling apart. I tried to do this by attaching the fixer script to MU1 and unset the gravity of MU2. But with the fixer script MU1 is not moving anymore.
best regards
Carsten
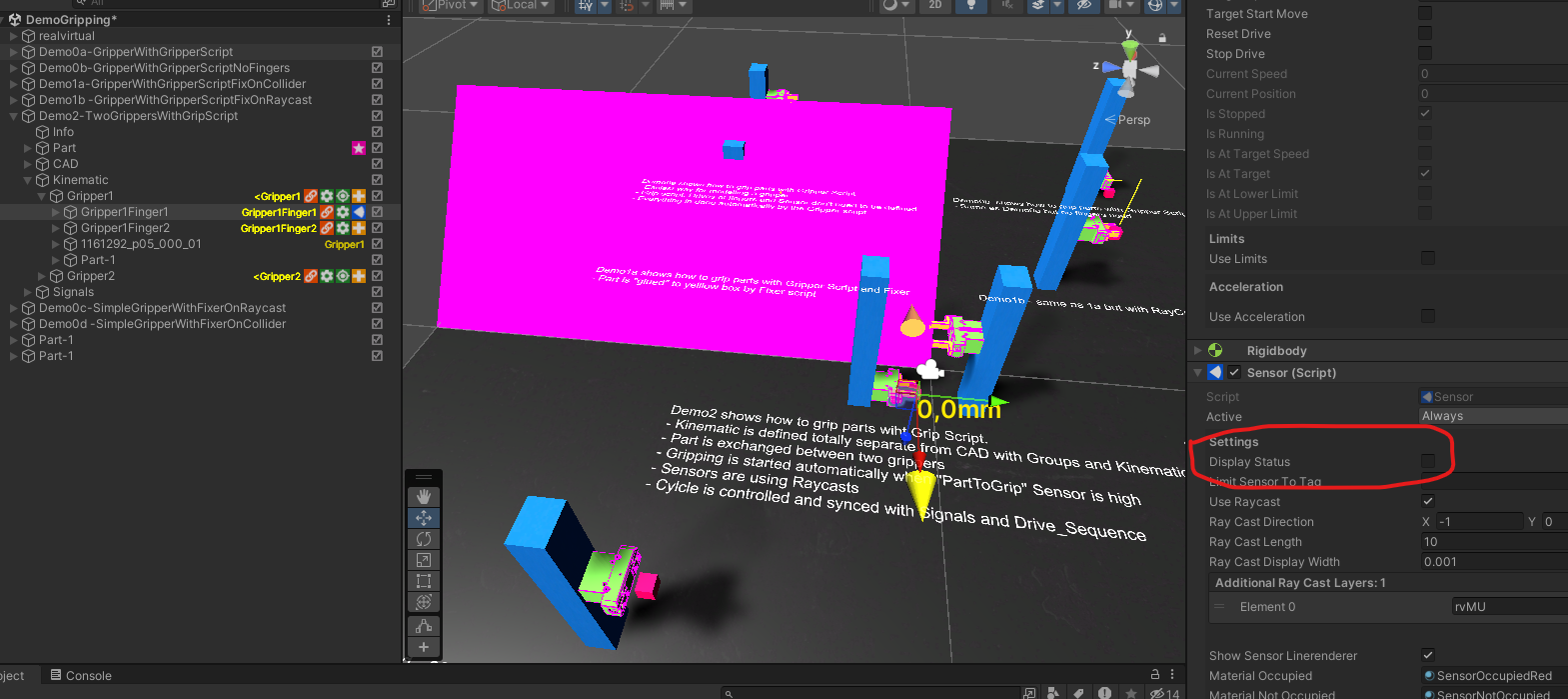
Bug in Sensor (Script) when disabling display status
Hi Thomas,
there seems to be a bug in Sensor (Script).
If I disable "Display Status" I see a purple graphical error only in game mode.
I tested this in "DemoGripping" version 2022.13.
Webgl Export wird in WinCC Unified nicht angezeigt
Hallo, ich habe das Demoprojekt von Realvirtual.io als Webgl 1 exportiert und möchte es als Custom Web Control in WinCC Unified einbinden. Die Schnittstelle ist erstmal egal, weil es im DemoModus läuft.
In Projektierungsmodus kann ich das Modell auch sehen. In der Runtime kommt leider ein weißes Fenster mit einem kleinen "Sorry" Icon oben links in der Ecke
Customer support service by UserEcho
