Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!
 area read Mode with DB
area read Mode with DB
Hello,
is there anyone who can explain, how I can get the data, when I use Area Read Write Mode in the S7 Interface? I tried to read form a DB, which worked well. So the connection to my CPD is OK.
Thanks
 Different rotations after update
Different rotations after update
Hi,
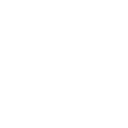
after I upgraded to version "2022.07", when I use "CADLink", my roboter model has different rotations after importing from a STEP-file. How is that?
That leads to many problems in my project....

Hello,
please check whether the option "Z is an upward vector" is activated or not. It is activated by default and leads to an automatic rotation after the import. Please let me know if the issue still occurs after checking this.
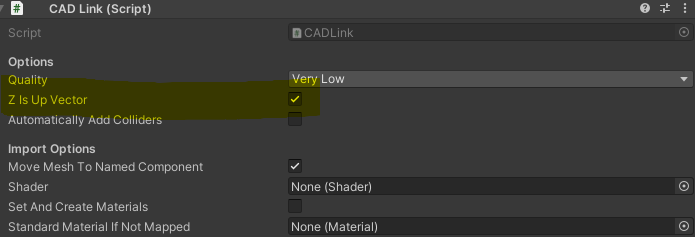
Regards Christin
Building to Android compiler error: Missing reference to SharedMemoryInterface in SharedMemoryInterfaceEditor
When switching build mode to Android, the SharedMemoryInterfaceEditor is still compiled but SharedMemoryInterface is not.
First line in SharedMemoryInterface:
#if UNITY_STANDALONE_WIN
First line in SharedMemoryInterfaceEditor:
#if (UNITY_EDITOR && !UNITY_EDITOR_OSX && !UNITY_EDITOR_LINUX)
Clearly, in android, the SharedMemoryInterface is not declared but SharedMemoryInterfaceEditor is, leading to compiler error.
Work around: Change first line in SharedMemoryInterfaceEditor to:
#if (UNITY_EDITOR && UNITY_STANDALONE_WIN && !UNITY_EDITOR_OSX && !UNITY_EDITOR_LINUX)
Thanks a lot - which version are you using. In the current release we are able to build to Android? The compiler define of your work around is a solution - in current release it should be solved by the assembly definition.
 Nothing happens after clicking import package from package manager
Nothing happens after clicking import package from package manager

Robot IK path to path bounce
Hi,
I've taken your prefab Stauebli robot and the path it comes with and simply made a second copy of the path then run the two paths in sequence by using Start Next Path. You can see in the video that the robot TCP jumps when transitioning from Path 1 to 2. Is there a way to correct this?
There are no Position Corrections applied or new TCP.
I have seen this in all the pathing that I have tried, regardless if Position Correction or new TCP is used. Some correction (bounce) happens when moving from one path to another.
It's a big issue because very often a path into a position is not the same as a path out (in a pick and place application) and this issue creates unusable behavior in this situation.
Thanks
Video https://i.imgur.com/hsgUAv5.gif


The issue is solved in a beta package, which is available to our customers. Will be included in the next release (upcoming 2022.10).
Fixer not fixing properly?
Hi,
I am quite stumped by the Fixer's behaviour. This should be simple functionality and it does not seem to work for me. It appears linked to how the "MUs Fixed" array is updating (or not updating).
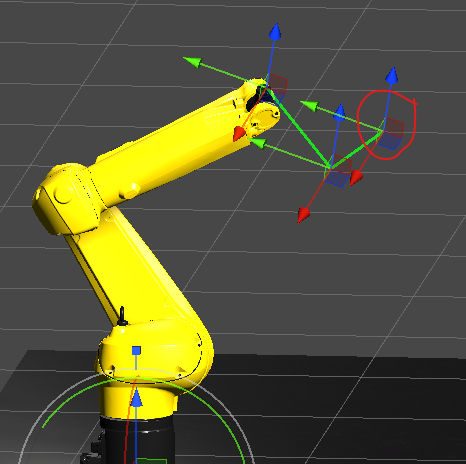
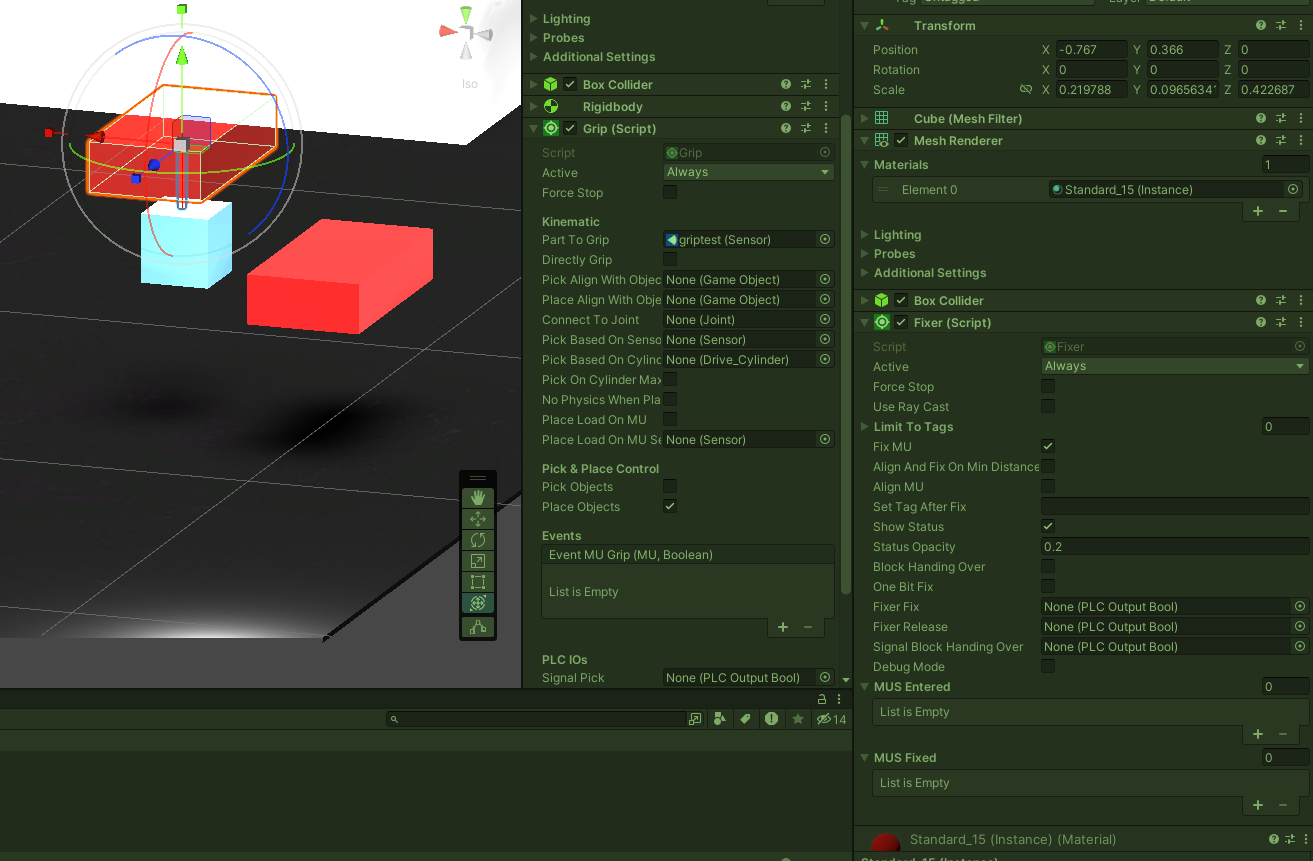
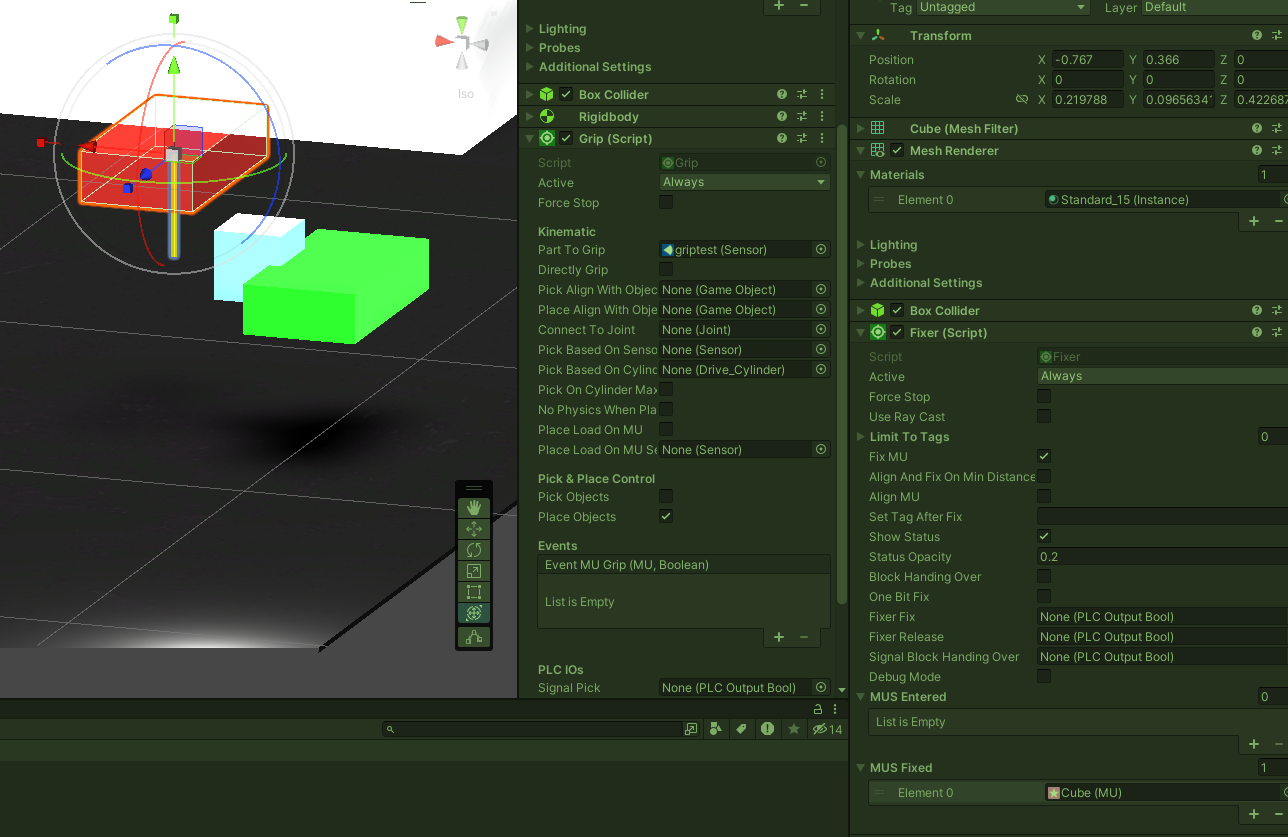
I have this gripper (grip & sensor) (yellow), MU (blue) and Fixer (red).
Picking works fine.
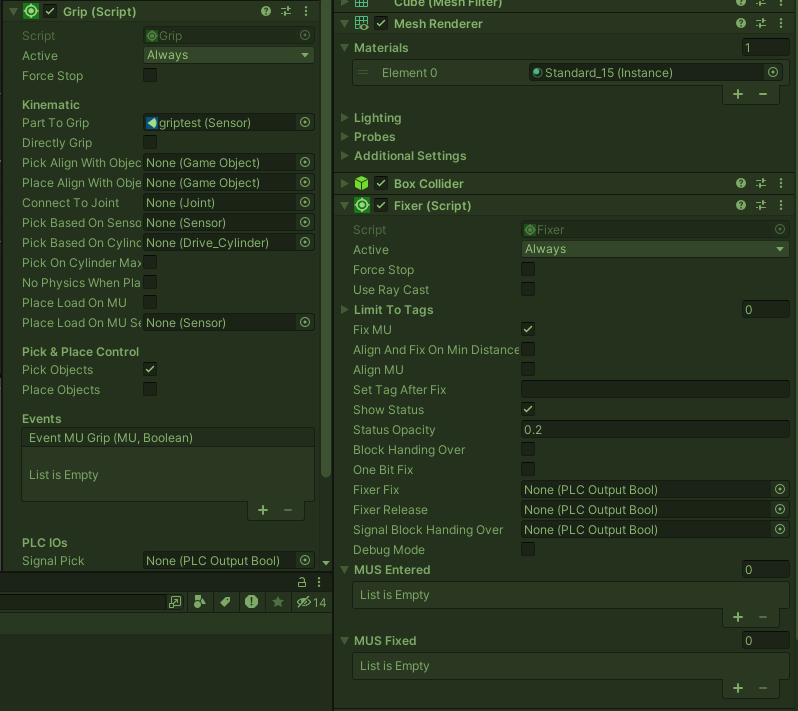
At this point, the MUS Fixed array is empty and the MU has been picked.
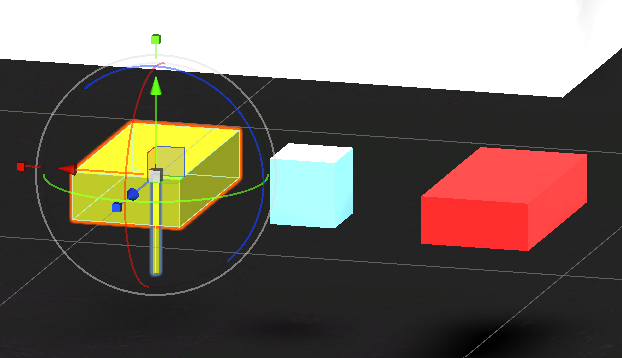
As soon as the MU is moved into the Fixer the MUS Fixed array updates but the MU is not actually fixed. And 'Place Objects' on the Grip has no effect.
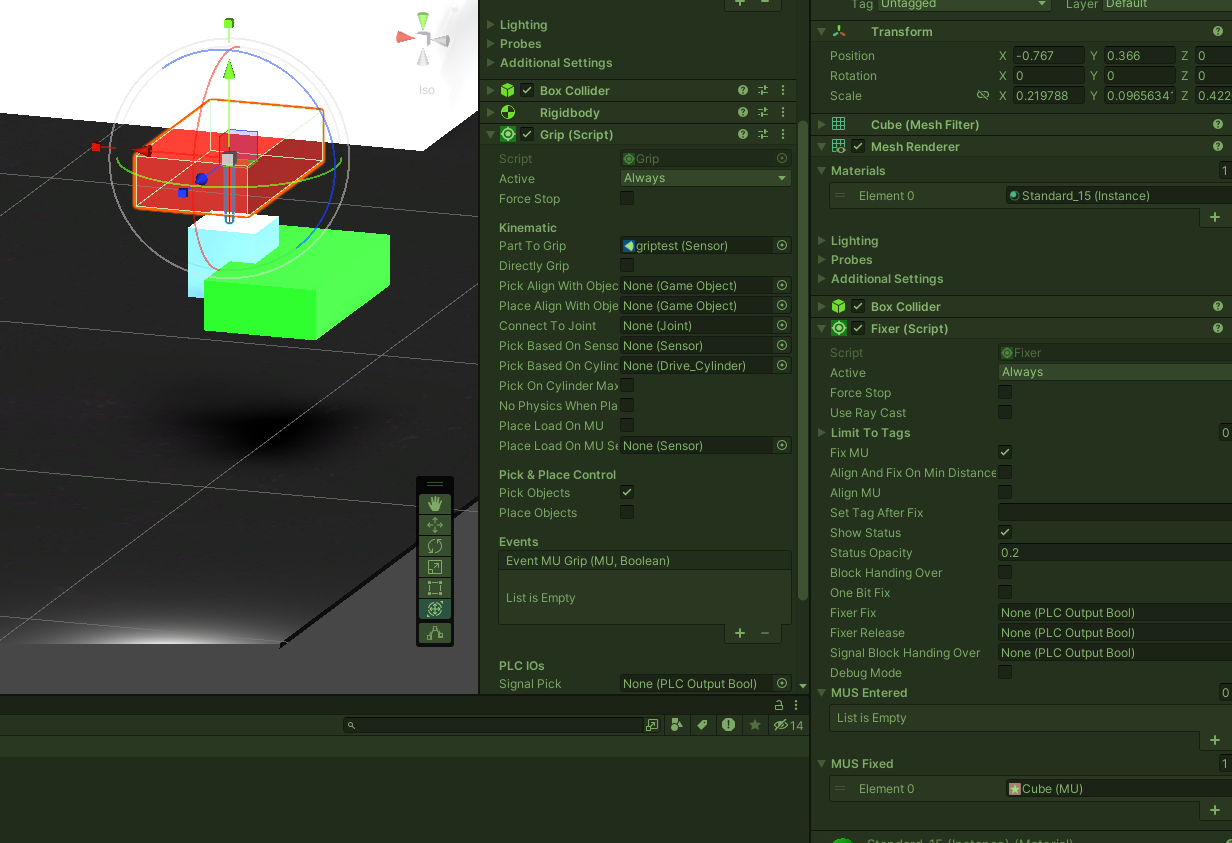
At this point, 'Place Objects' was clicked while in the Fixer collider but was not Fixed.
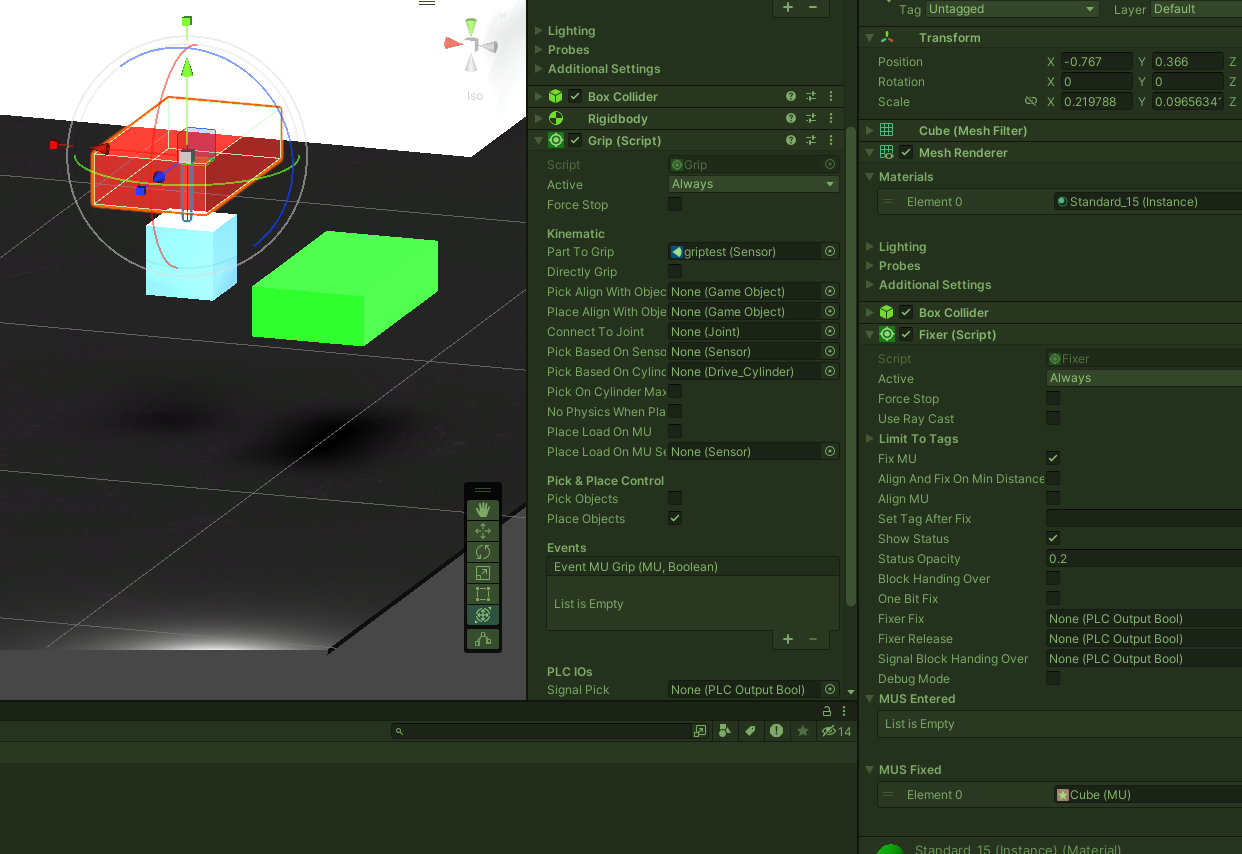
But if I clear the MUS Fixed array then re-enter the Fixer with 'Placed Objects' on, the MU becomes Fixed.
Picking works but the MUS Fixed array is not cleared.
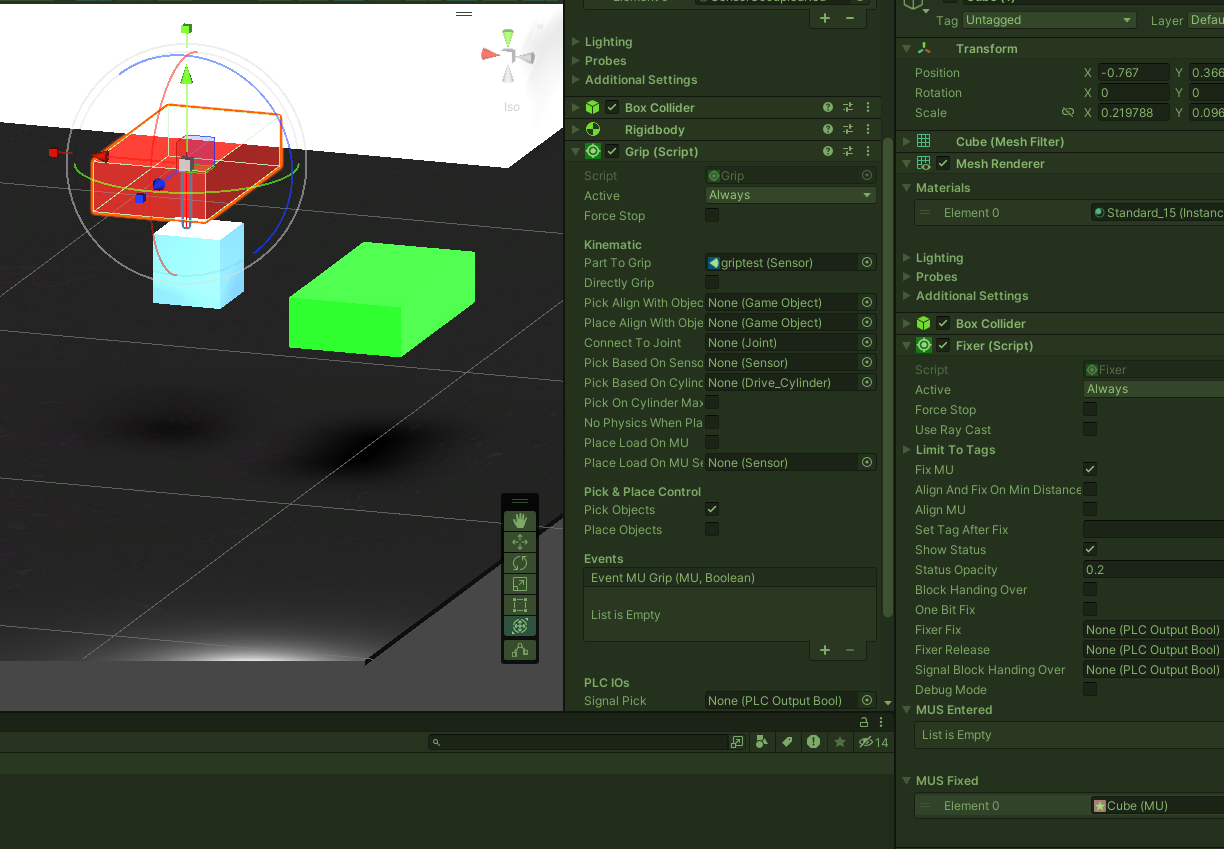
Placing again will not work until the MUS Fixed array is cleared manually. MUS Entered array is never updated.
I notice that in the Gripping MUs sample this does seem to work and arrays are updated properly. But there's a number of signals in use in that demo. Perhaps it works only when PLC signals are used. But it would be nice if it worked without the PLC signals.
Hi,
I have setup the situation as you described.
The settings in my Grip-script are the following:
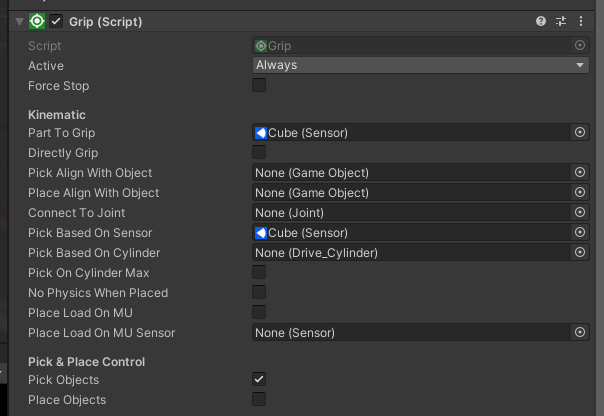
With this settings it works when you switch between pick and place during the game mode. The Fixer only keep the MU if the gripper is set to place. The gripper always holds the higher priority.
According to your screen shots I'm not quite sure how the picking was able to work because there is no pick mode defined.
(for this have a closer look in out documentation: Grip - realvirtual.io User Documentation (gitbook.com).
Kind regards
Christin

logicstep
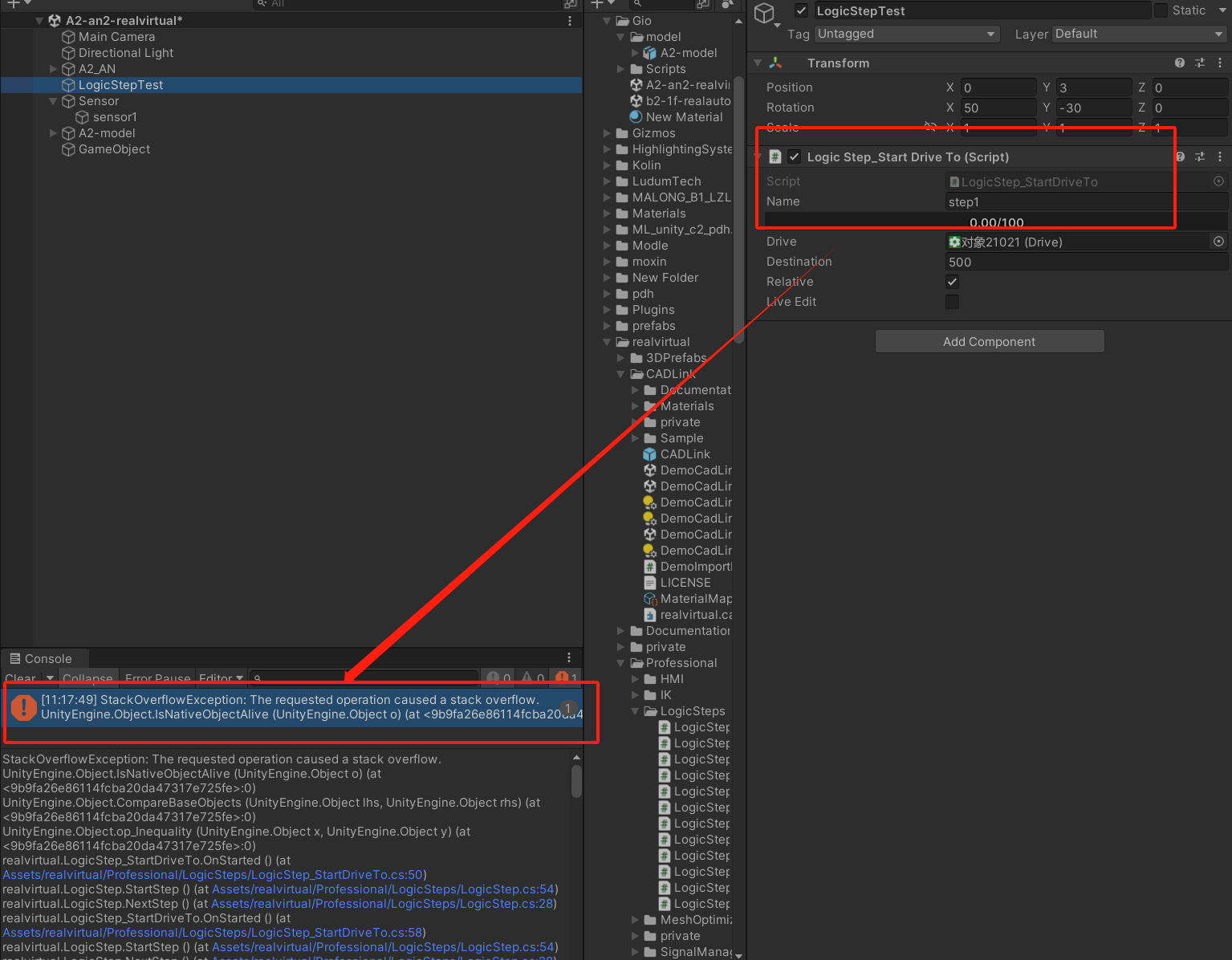
I added a Logicstep script, but there is an error in the above screenshot, what is the reason?
Hi, this is a non blocking step - this is why it is getting in a infinite loop.
OPCUA Interface - Connection Error Could not resolve host
WebGL 浏览器报 OPCUA Interface - Connection Error Could not resolve host,错误,哪位大佬知道?
Error in creating new Subscription in Demo Scene (OPCUA4UNITY)
Hello,
I am using OPCUA4UNITY. When I try out the demo scene with the OPC UA C++ Demo Server, I get this error when trying to read nodes. Importing nodes seem to work fine.
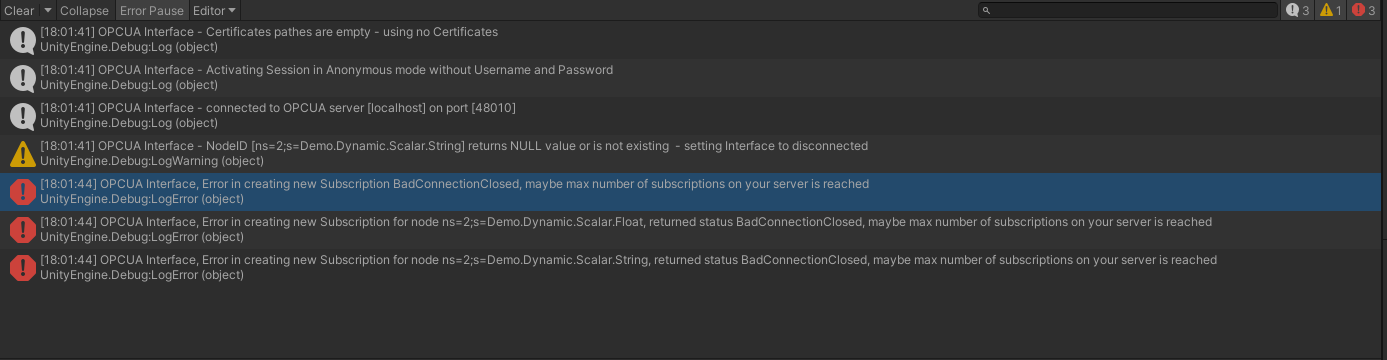
And for some nodes (DateTime in this case) I get this error. None of them seems to work.

Using Unity version 2022.3.0

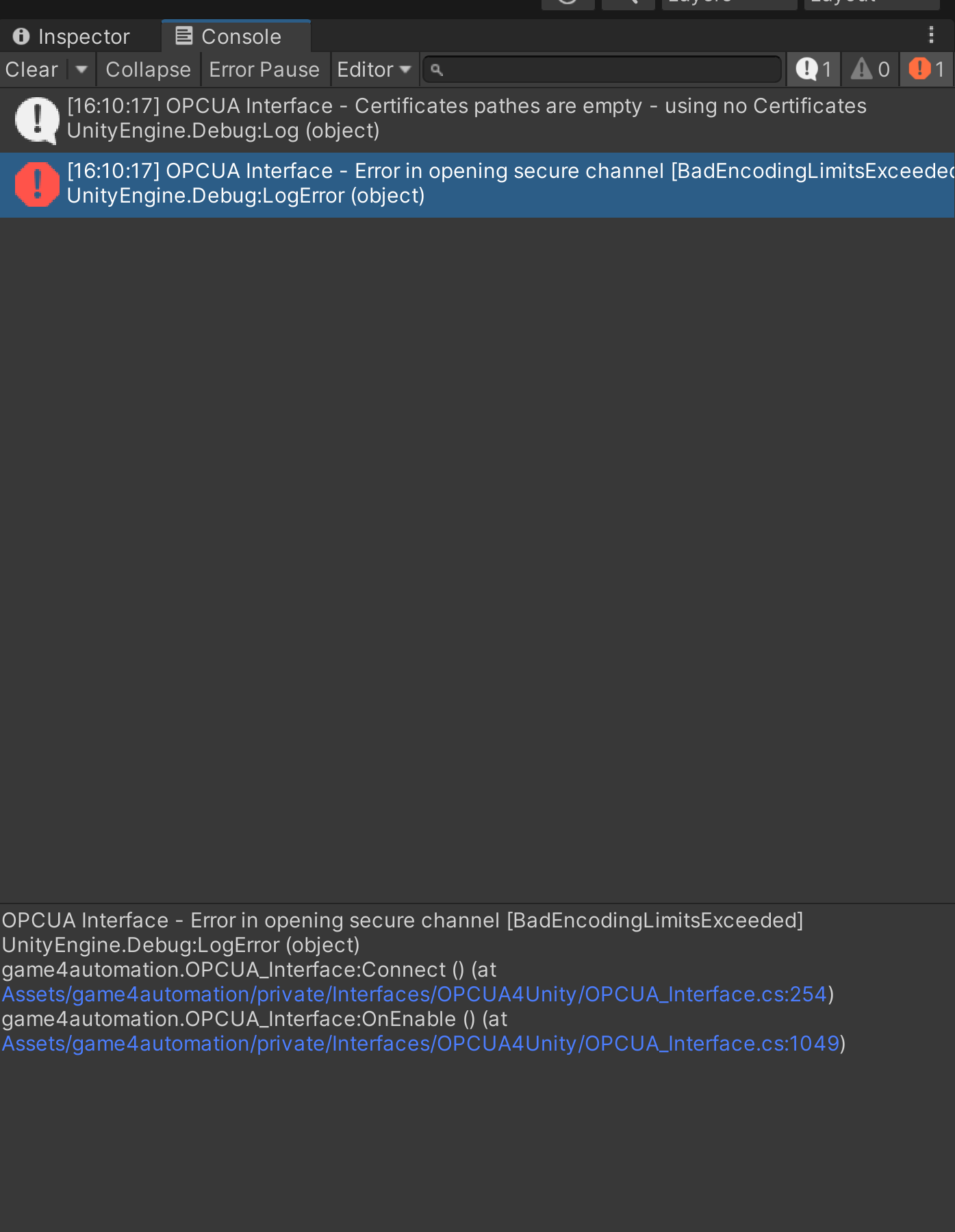
OPCUA - ROBODK
Hello!
When I'm trying to connect to RoboDK with OPCUA - getting this message.
How to solve this problem?
Customer support service by UserEcho

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}