Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!
 OPCUA_Interface with Kepserverex Windows 11 communication issue
OPCUA_Interface with Kepserverex Windows 11 communication issue
Dear all,
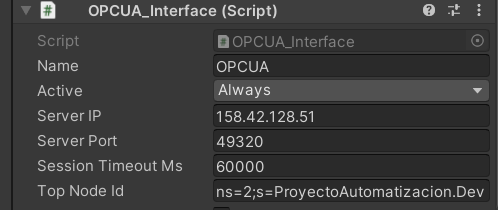
I experienced a problem when connecting with Kepserverex OPCUA server through OPCUA_Interface in windows 11.
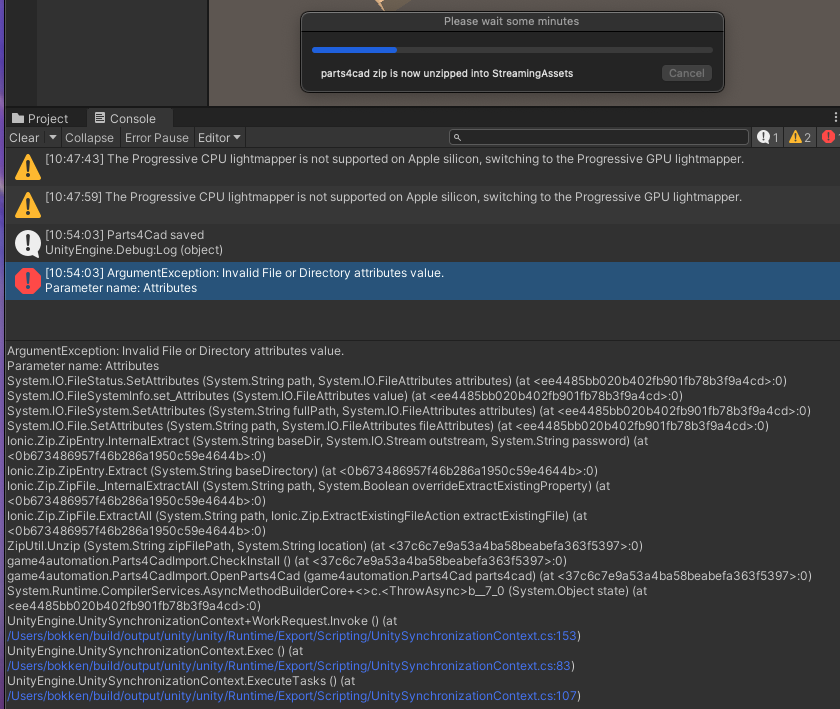
When I specify the IP address in the OPCUA_Interface, the following error appears:
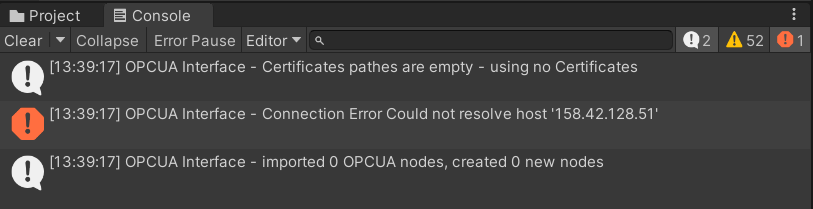
Looks like the problem is in line 133 of the OPCUA_Interface script:
IPAddress ipAddress = Dns.GetHostEntry (ServerIP).AddressList[0];
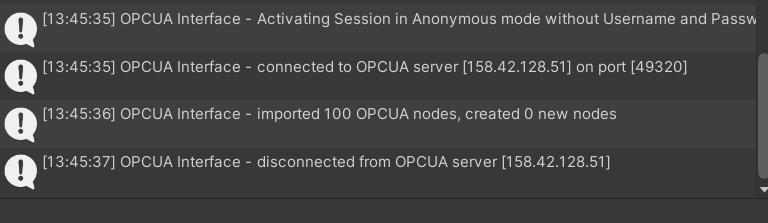
If I remove this instruction, then the communication seems to be established.
This issue doesn't happen when running the same version of Keperverex and Project Unity in Windows 10.
Have any one experienced this issue?
Thank you in advance!
 Interface Siemens SIMIT (PRO) to UNITY
Interface Siemens SIMIT (PRO) to UNITY
Hello Thomas,
I would like to set up a connection from Unity to Simit via the "Siemens Simit (PRO)" interface. I downloaded the files from Siemens and installed according to the documentation. Then I tried to connect the whole thing to the realvirtual.io interface. The connection was also successful. According to the realvirtual.io documentation, the signals to be exchanged should be attached to the interface as "children". Now to the problem: Simit does not get the signals from Unity i have attached. Could you see where the Problem is?
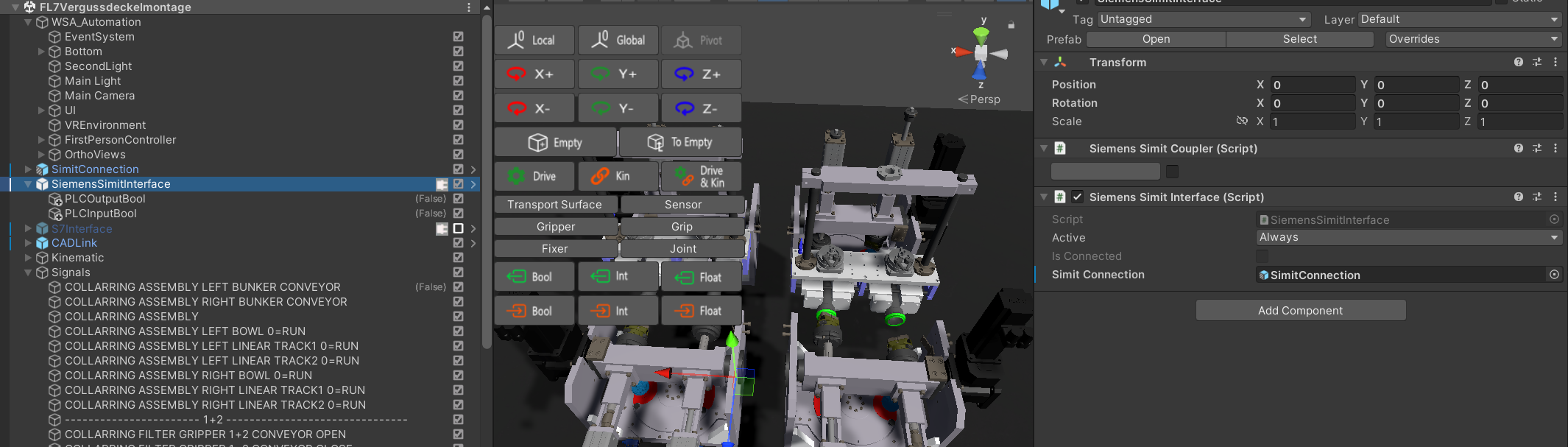
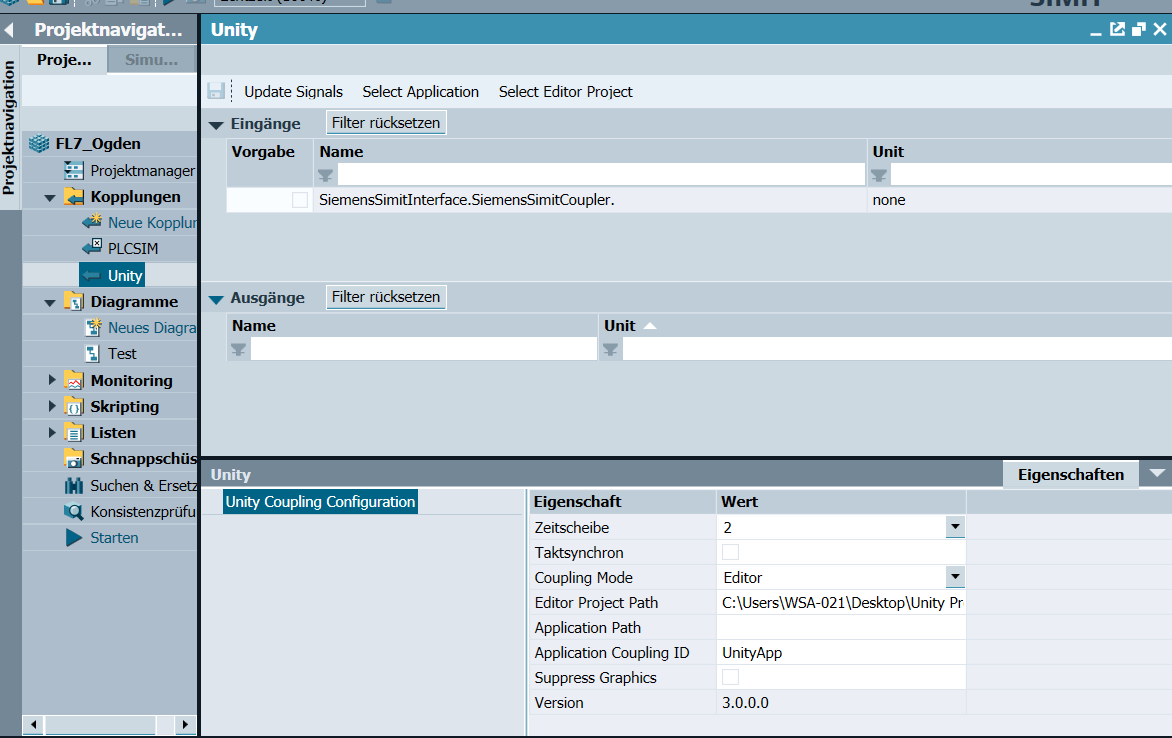
Thanks a lot for your help
Meshes disappearing when making prefab
Hello,
When i'm making a prefab using an imported STEP using the cadlink tool the meshes disappear. Did I forget a setting and how to fix this? I had the "Set and Create Materials" enabled.

Hi,
you need to export the imported STEP data as FBX. This will save the meshes permanently. With this FBX you can create a prefab with real-virtual components. The FBX exporter is available in the package manager.
Regards Christin
Relationship between the number of points of parameters managed by the OPCUA server and the communication cycle.
When the number of parameters managed by the OPCUA server is increased (from 30 to 120),
The values are being sent in bits and pieces.
Does the frequency of communication decrease in proportion to the number of parameters?
Yes the performance should go down. It also depend on the subscription parameters and server settings, e.g. how often updates are sent. If there are many parameters which are changing very fast it might make sense to poll the variables instead of subscribing to them. But all depends on the application you are building.
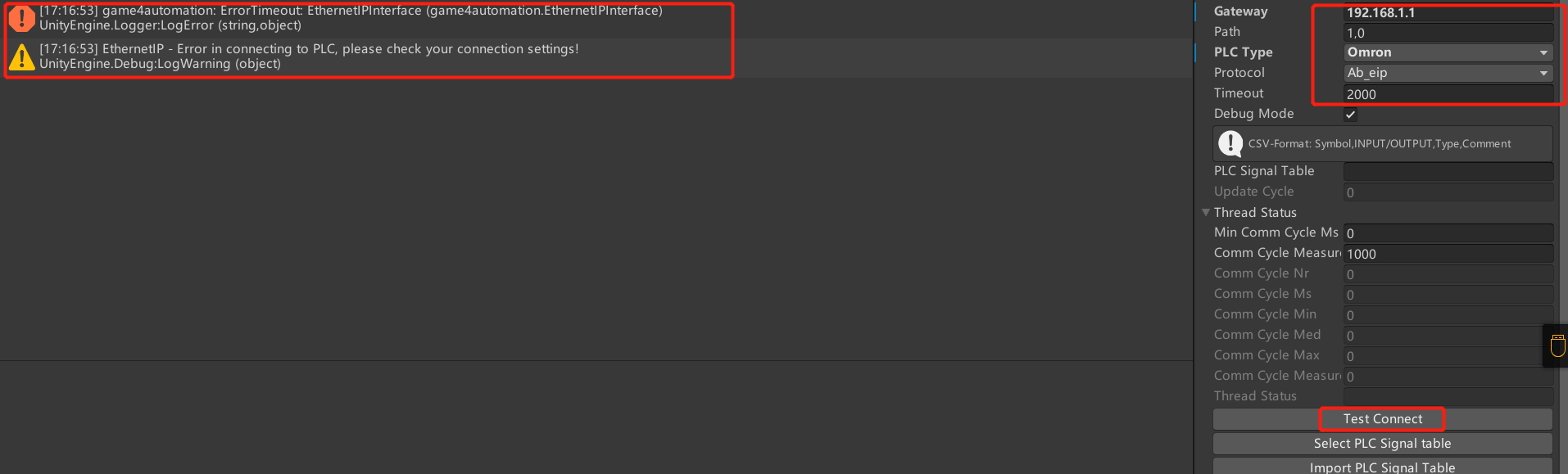
Inability to connect Omron plc via enternetip
Dear
When connecting Omron PLC NX1P2 via enternetip, set the above parameters, then click the TEST CONNECT button, the connection fails, the computer can ping through 192.168.1.1, about the parameter path setting, it is not clear how to set, have tried in many ways, I can't even make a connection.
Thank you
Postprocessing works only in the editor
Good morning,
Using the professional version and building for windows the postprocessing works only in the editor and not in the build, what can depend on?
Thank you,
G.D.
Hello,
I have checked your project and solved the problem:
- I added an empty game object to the hierarchy
- add to the layer "rvSelection"
- moved the post process volume from the main camera to the empty game object.
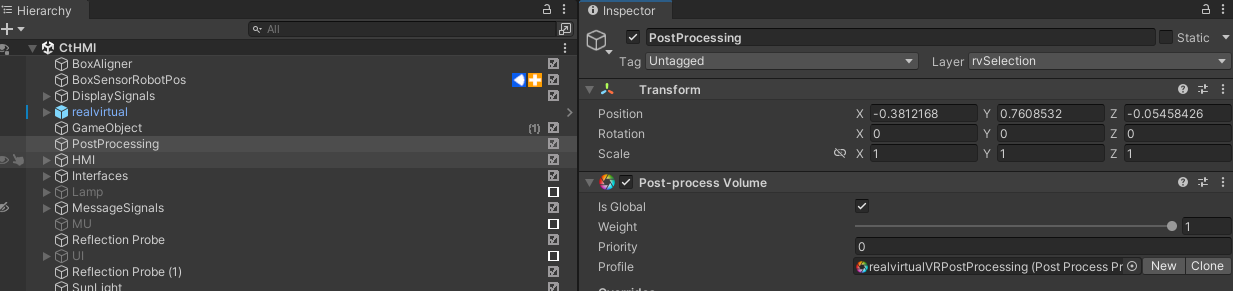
- added the scene in the build settings
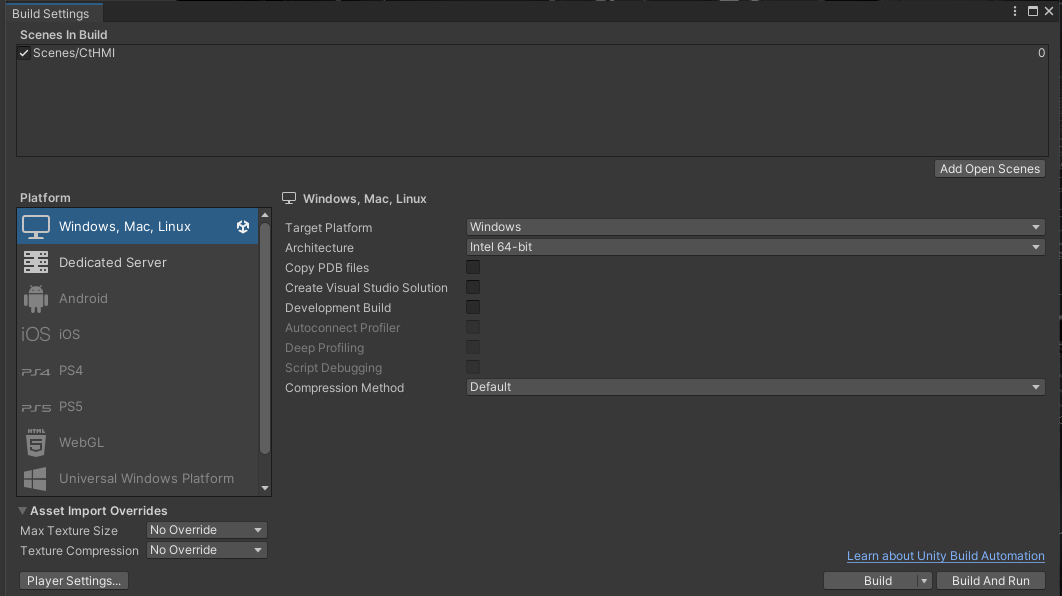
With this the build was successful. Please evaluate this on your version and let me if it works.
Kind regards
Christin

il2cpp error
Good morning,
We purchased the professional package but we can't run the builds in webgl, we have the following error.
How can we solve it?
We have tried various versions of unity, currently we use 2021.3.24f1.
Thank you,
G.D.
C:\Program Files\Unity\Hub\Editor\2021.3.24f1\Editor\Data\il2cpp\build\deploy\il2cpp.exe --convert-to-cpp --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/EasyModbus.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/endel.nativewebsocket.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/game4automation.base.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/game4automation.cadlink.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/game4automation.ik.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/game4automation.interfaces.abbrobotstudio.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/game4automation.interfaces.mqtt.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/game4automation.interfaces.opocua.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/game4automation.interfaces.plcsimadvanced.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/game4automation.interfaces.s7tcpip.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/game4automation.interfaces.sharedmemory.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/game4automation.interfaces.twincatads.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/game4automation.parts4cad.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/game4automation.spacenavigator.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/game4automation.TwinCATHMIClient.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/game4automation.visualscripting.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/I18N.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/I18N.West.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/ikcalculator.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/Ionic.Zip.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/MathNet.Numerics.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/Mono.Security.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/mscorlib.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/NaughtyAttributes.Core.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/Sharp7.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/System.Configuration.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/System.Core.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/System.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/System.Numerics.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/System.Runtime.Serialization.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/System.Windows.Forms.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/System.Xml.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/System.Xml.Linq.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/TwinCAT.Ads.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/UnityEngine.AnimationModule.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/UnityEngine.AudioModule.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/UnityEngine.CoreModule.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/UnityEngine.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/UnityEngine.GridModule.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/UnityEngine.IMGUIModule.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/UnityEngine.InputLegacyModule.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/UnityEngine.ParticleSystemModule.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/UnityEngine.Physics2DModule.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/UnityEngine.PhysicsModule.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/UnityEngine.SharedInternalsModule.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/UnityEngine.SpriteShapeModule.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/UnityEngine.TerrainModule.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/UnityEngine.TextCoreFontEngineModule.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/UnityEngine.TextCoreTextEngineModule.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/UnityEngine.TextRenderingModule.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/UnityEngine.TilemapModule.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/UnityEngine.UI.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/UnityEngine.UIElementsModule.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/UnityEngine.UIElementsNativeModule.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/UnityEngine.UIModule.dll --assembly=Library/Bee/artifacts/WebGL/ManagedStripped/UnityEngine.WindModule.dll --data-folder=C:/Users/GD/tre/Library/Bee/artifacts/WebGL/il2cppOutput/data --generatedcppdir=C:/Users/GD/tre/Library/Bee/artifacts/WebGL/il2cppOutput/cpp --enable-analytics --emit-method-map --dotnetprofile=unityaot-linux --profiler-report --profiler-output-file=C:/Users/GD/tre/Library/Bee/artifacts/il2cpp_conv_bs0c.traceevents --print-command-line
Error: IL2CPP error (no further information about what managed code was being converted is available)
System.AggregateException: One or more errors occurred. (The given key 'nop' was not present in the dictionary.)
---> System.Collections.Generic.KeyNotFoundException: The given key 'nop' was not present in the dictionary.
at System.Collections.Generic.Dictionary`2.get_Item(TKey key)
at Unity.IL2CPP.DataModel.Instruction..ctor(Instruction instruction)
at Unity.IL2CPP.DataModel.BuildLogic.Populaters.MethodBodyPopulator.CreateInstructions(CecilSourcedAssemblyData assemblyDef, MethodDefinition method, MethodDefinition source, ReadOnlyCollection`1 variables, Dictionary`2& instructionMap)
at Unity.IL2CPP.DataModel.BuildLogic.Populaters.MethodBodyPopulator.PopulateMethodBody(CecilSourcedAssemblyData assemblyData, MethodDefinition method, MethodDefinition source)
at Unity.IL2CPP.DataModel.BuildLogic.Populaters.DefinitionPopulater.PopulateMethodDefs(CecilSourcedAssemblyData assemblyData, TypeDefinition typeDef)
at Unity.IL2CPP.DataModel.BuildLogic.Populaters.DefinitionPopulater.PopulateTypeDef(TypeContext context, UnderConstructionMember`2 type)
at Unity.IL2CPP.DataModel.BuildLogic.DataModelBuilder.<PopulateCecilSourcedDefinitions>b__13_1(UnderConstructionMember`2 typeDef)
at System.Threading.Tasks.Parallel.<>c__DisplayClass44_0`2.<PartitionerForEachWorker>b__1(IEnumerator& partitionState, Int32 timeout, Boolean& replicationDelegateYieldedBeforeCompletion)
--- End of stack trace from previous location ---
at System.Threading.Tasks.Parallel.<>c__DisplayClass44_0`2.<PartitionerForEachWorker>b__1(IEnumerator& partitionState, Int32 timeout, Boolean& replicationDelegateYieldedBeforeCompletion)
at System.Threading.Tasks.TaskReplicator.Replica`1.ExecuteAction(Boolean& yieldedBeforeCompletion)
at System.Threading.Tasks.TaskReplicator.Replica.Execute()
--- End of inner exception stack trace ---
at System.Threading.Tasks.TaskReplicator.Run[TState](ReplicatableUserAction`1 action, ParallelOptions options, Boolean stopOnFirstFailure)
at System.Threading.Tasks.Parallel.PartitionerForEachWorker[TSource,TLocal](Partitioner`1 source, ParallelOptions parallelOptions, Action`1 simpleBody, Action`2 bodyWithState, Action`3 bodyWithStateAndIndex, Func`4 bodyWithStateAndLocal, Func`5 bodyWithEverything, Func`1 localInit, Action`1 localFinally)
--- End of stack trace from previous location ---
at System.Threading.Tasks.Parallel.ThrowSingleCancellationExceptionOrOtherException(ICollection exceptions, CancellationToken cancelToken, Exception otherException)
at System.Threading.Tasks.Parallel.PartitionerForEachWorker[TSource,TLocal](Partitioner`1 source, ParallelOptions parallelOptions, Action`1 simpleBody, Action`2 bodyWithState, Action`3 bodyWithStateAndIndex, Func`4 bodyWithStateAndLocal, Func`5 bodyWithEverything, Func`1 localInit, Action`1 localFinally)
at System.Threading.Tasks.Parallel.ForEachWorker[TSource,TLocal](IEnumerable`1 source, ParallelOptions parallelOptions, Action`1 body, Action`2 bodyWithState, Action`3 bodyWithStateAndIndex, Func`4 bodyWithStateAndLocal, Func`5 bodyWithEverything, Func`1 localInit, Action`1 localFinally)
at System.Threading.Tasks.Parallel.ForEach[TSource](IEnumerable`1 source, Action`1 body)
at Unity.IL2CPP.DataModel.BuildLogic.Utils.ParallelHelpers.ForEach[TSource](IEnumerable`1 source, Action`1 func, Boolean enableSerial)
at Unity.IL2CPP.DataModel.BuildLogic.DataModelBuilder.PopulateCecilSourcedDefinitions(ReadOnlyCollection`1 assemblyData)
at Unity.IL2CPP.DataModel.BuildLogic.DataModelBuilder.Build()
For the moment not but we are working on a solution to manage this via assembly definitions - we think this should do the job. But it will take 3-4 weeks until we will release that.
Install Assets (realvirtual.io Digital Twin) doesn't work
I bought the 'realvirtual.io Digital Twin Asset', I think there are 2 options to get it running:
1) Via the Asset Store -> click on 'open in Unity' (After clicking there are no extra asset visible, see image).
2) Via 'import custom package' (I don't know which file to open, see image).
Customer support service by UserEcho
