Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!

 OPC UA PLC RECONNECT
OPC UA PLC RECONNECT
If the PLC is disconnected, the application hangs/crashes.

 Regarding the issue of importing step from CADLINK
Regarding the issue of importing step from CADLINK
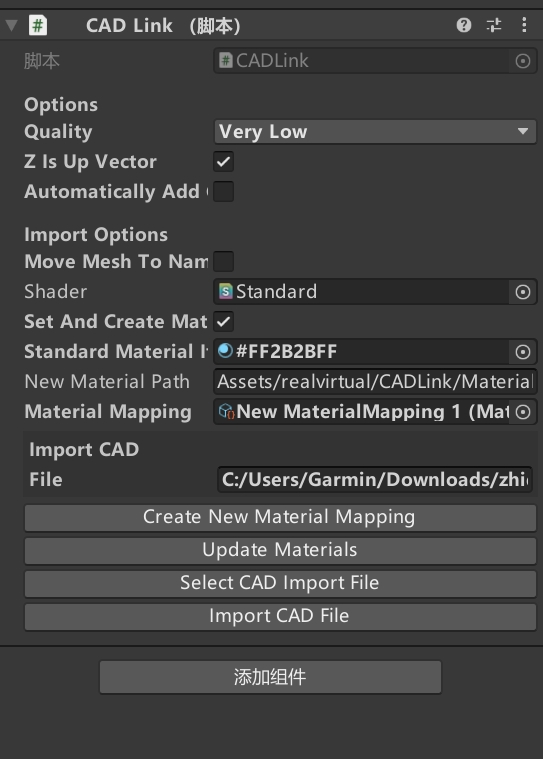
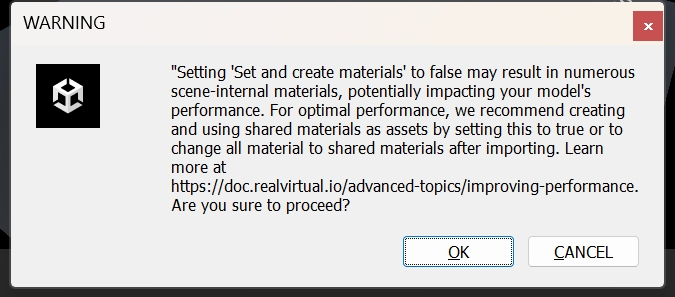
When importing step using CADLINK, "Set and create materials" has been clearly checked. However, after clicking "Import CAD File", this prompt still pops up. If the import continues, the program will crash.

Installation hangs on PLCInputFloat Icon.png
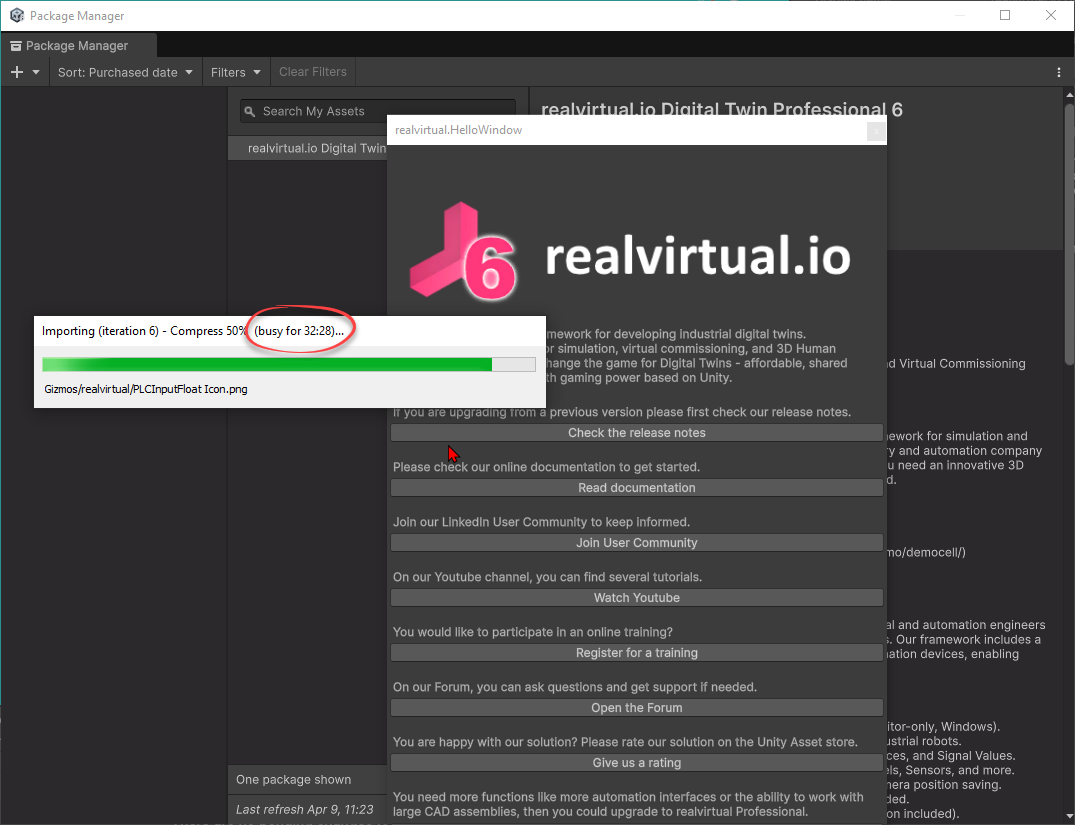
When installing RealVirtual Pro from Package Manager the installation hangs on PLCInputFloat Icon.png when the HelloWindow appears. If I close the HelloWindow the installation continues.
 PLC Input an PLC Output are disabled when pressing play
PLC Input an PLC Output are disabled when pressing play
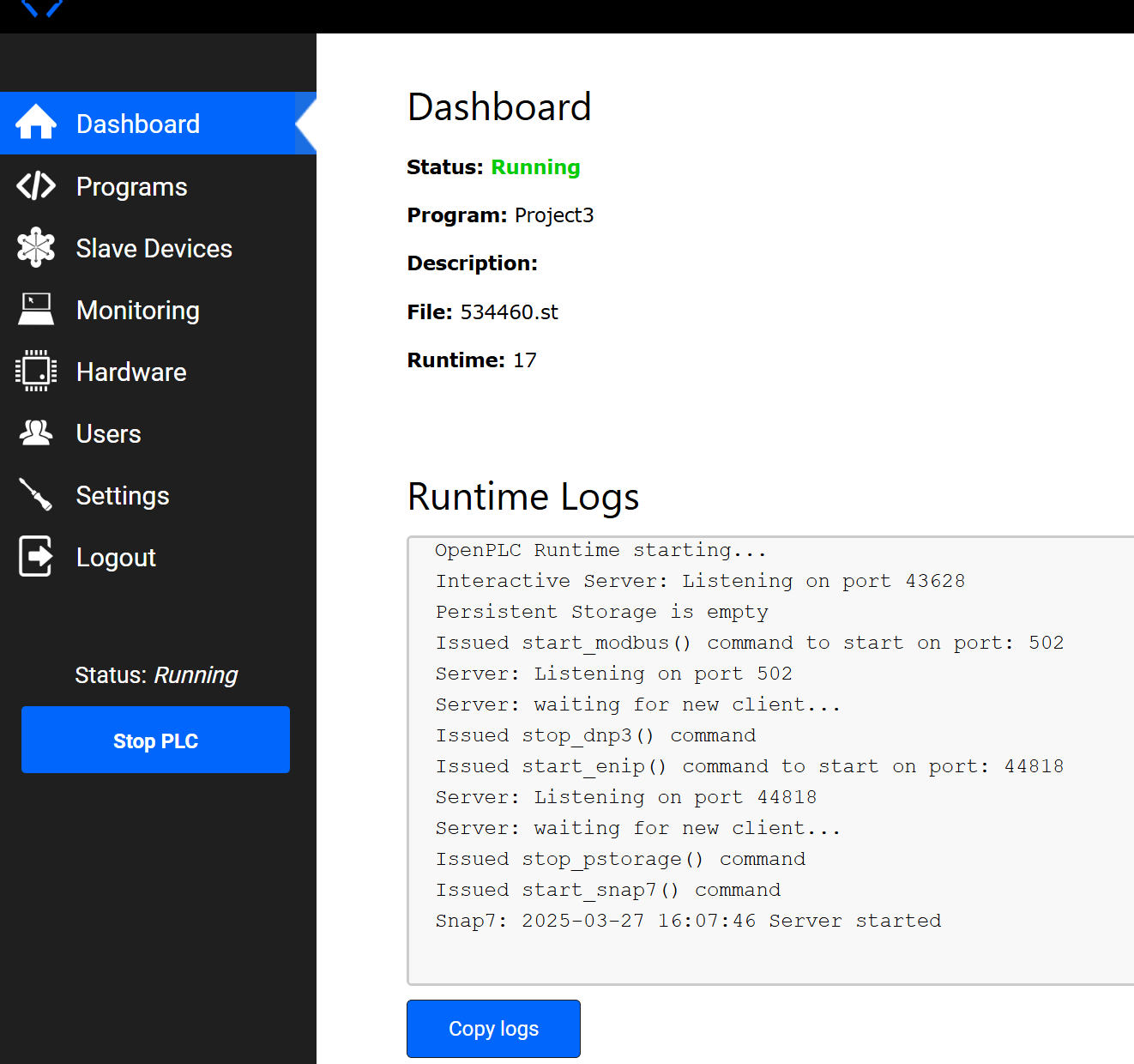
I use RealVirtual starter. I have added the S7Interface to my Unity project. I have created a softplc with OpenPLC with a very simple program
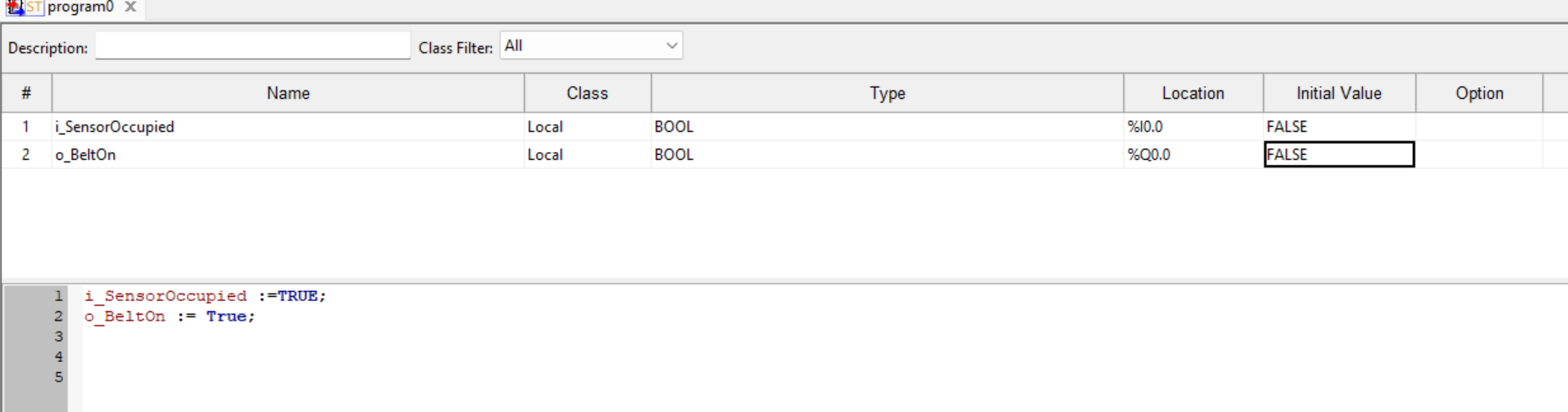
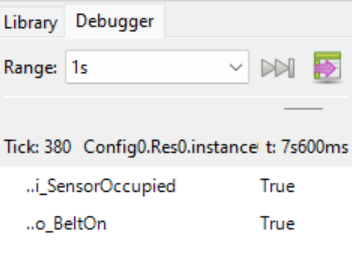
When I run it it works: values become true.
I compiled it to a runtime that also works.
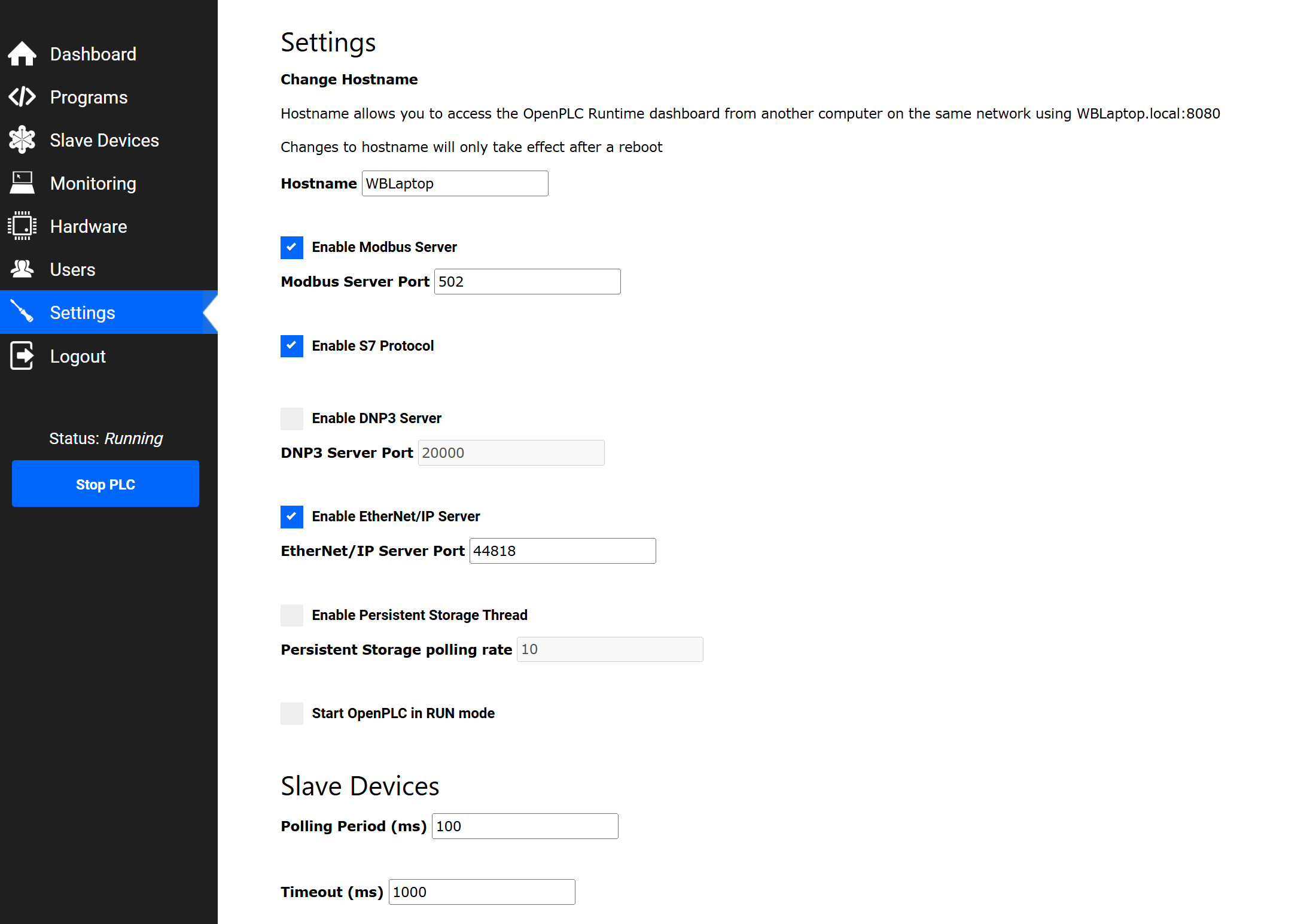
I have switched on S7 protocol for the softPLC
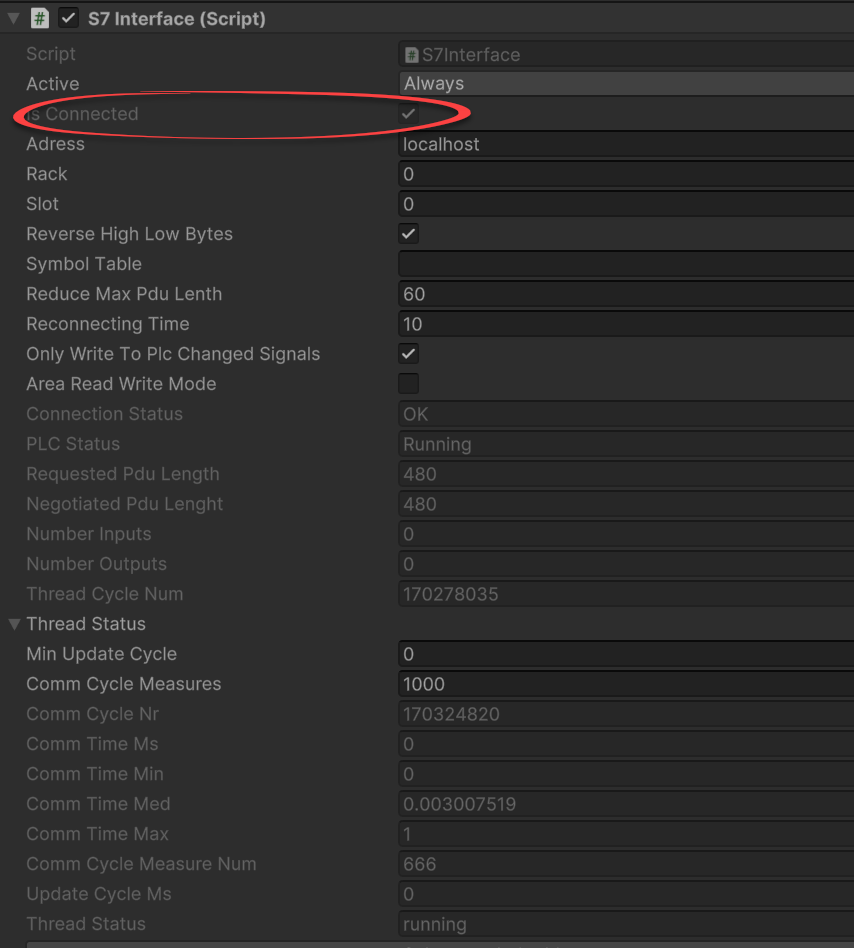
I can connect from Unity to the softplc
I have added the two signals to Unity
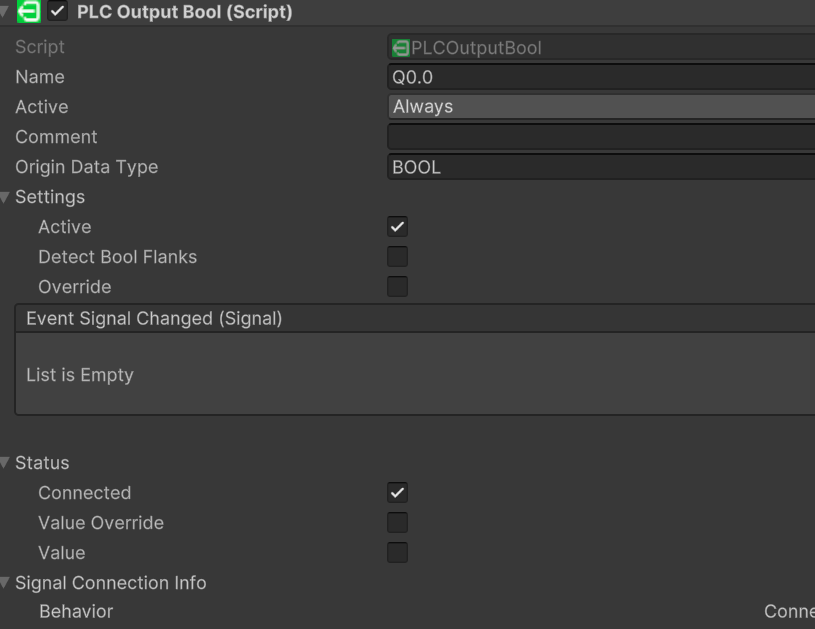
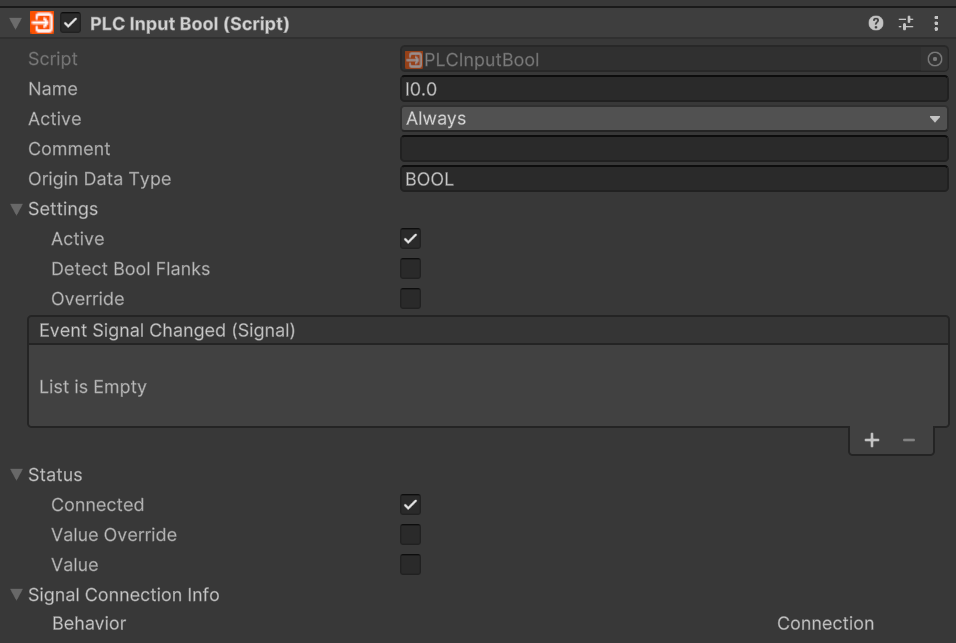
When I press Play in Unity the connection is made to the softPLC butboth PLC scripts are disabled.
Why is this ?
Transport Surface - Issue with "Change Constraints on Enter / Exit"
I am having difficulty with changing constraints on enter/exit of a transport surface. I get the following errors in runtime.
NullReferenceException: Object reference not set to an instance of an object
realvirtual.TransportsurfaceCollider.OnCollisionEnter (UnityEngine.Collision other) (at Assets/realvirtual/TransportsurfaceCollider.cs:29)
UnityEngine.Physics:OnSceneContact(PhysicsScene, IntPtr, Int32)
NullReferenceException: Object reference not set to an instance of an object
realvirtual.TransportsurfaceCollider.OnCollisionExit (UnityEngine.Collision other) (at Assets/realvirtual/TransportsurfaceCollider.cs:41)
UnityEngine.Physics:OnSceneContact(PhysicsScene, IntPtr, Int32)
Now for the strange part, the transport surface IS correctly setting the constraint on enter (Freeze position x in my case), but this constraint does not get removed on exit. I do have "Change constraints on exit" set to true and "none" set for the constraints exit. In the "Loaded Part" list in the transport surface, there are no objects listed in runtime even though there are game objects on the transport surface.
Has anyone else ran into this issue before? Seems weird that I am getting that error on enter, but the constraint is still getting set correctly.
How to tell wether a Path finished?
Hello,
I am currently working on a script that allows me to program linear movement (7th axis) for an IK robot between IKPaths. The script starts a drive destination after a Boolean is set or when a path has finished. After the linear movement, it either sets a signal or starts another path. Everything is working fine, but to check whether an IKPath has finished, I would like to use something like IKPath.PathIsFinished. However, this value does not seem to be set anywhere, even though it appears in the status bar of the IKPath inspector window.
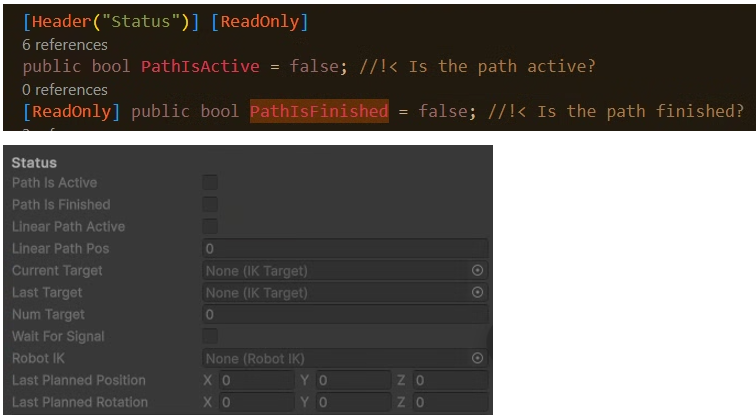
I considered adding a line to the CheckNextTarget function, but ideally, I would prefer not to modify the realVirtual scripts directly:
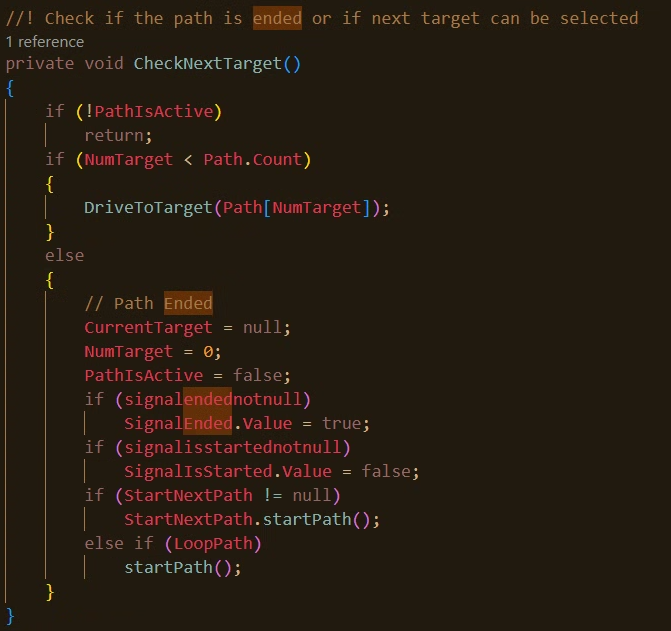
Is this a bug? The value should be set somewhere...
Best regards,
Nico
Questions about Modbus TCP connection to Siemens 200smart
May I ask if your company has launched the modbus client access function? I need to enter an IP and PORT to access Siemens 200smart PLC.

Guided MUs not rotating on Guided transports in Unity 6

After upgrading to Unity 6 LTS, the MUs are no longer rotating on turn surfaces while following a Guided Transport, however if I go back to unity 2022 it is working as intended, what could be causing this?
große Abweichungen bei Robot - IK - Targets
Hallo,
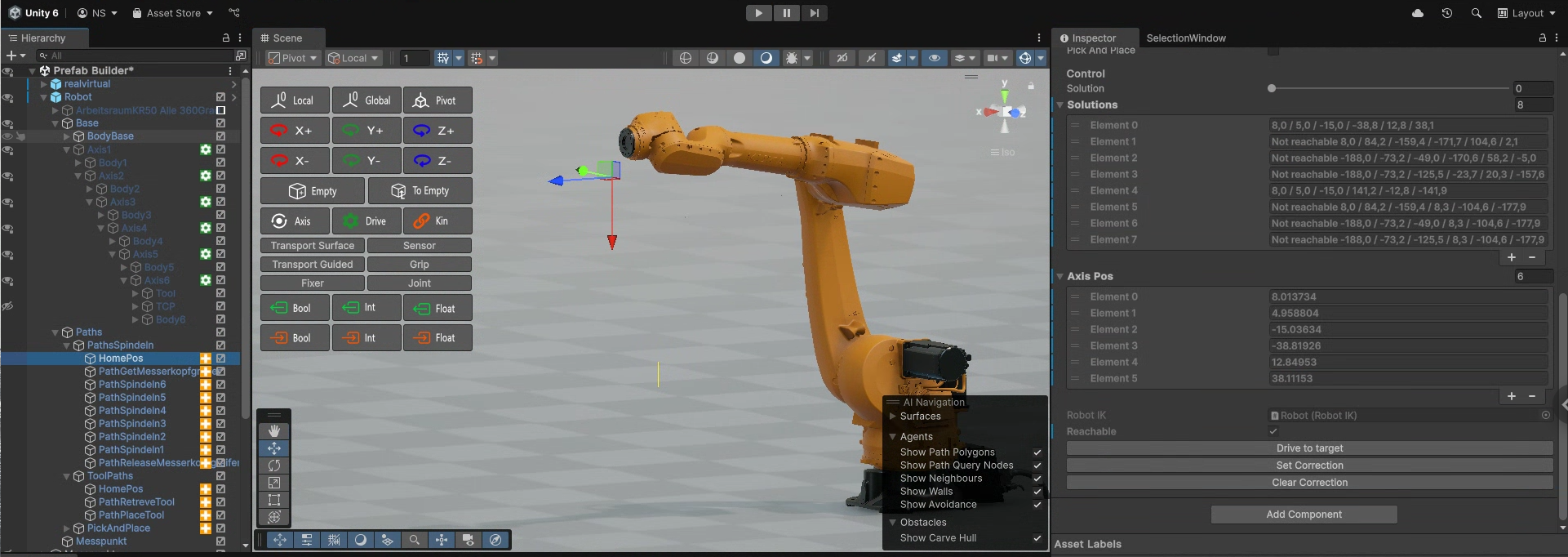
ich arbeite mit realvirtual Pro und nutze die Inverse Kinematik, um Roboterpfade zu programmieren. Dabei fällt mir auf, dass ich nach jeder Verschiebung eines Targets mehrfach auf „Set Correction“ klicken muss, da sonst eine erhebliche Abweichung entsteht. Besonders problematisch wird dies, wenn die Abweichung so groß ist, dass das Ziel nicht mehr erreichbar ist.
Liegt der Fehler in meiner kinematischen Kette?
Ich verwende einen KUKA-Roboter, den ich in realvirtual nachgebildet habe. Dazu habe ich die Roboter-Vorlage von realvirtual genutzt und die Achspositionen entsprechend angepasst. Die Positionen habe ich in meinem CAD-Programm gemessen. Anschließend habe ich die Körper hinzugefügt. Das beigefügte Bild zeigt die Abweichung ohne Korrekturdaten.
Was könnten Gründe für die großen Abweichungen sein?
Falls dieses Verhalten normal ist: Gibt es einen Weg den "Set Correction"-Vorgang zu Automatisieren, zum Beispiel mit dem selection-manager? (Habe nämlich bereits gut 100 Targets und es werden mehr werden...)
Viele Grüße,
Nico
Customer support service by UserEcho
