Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!

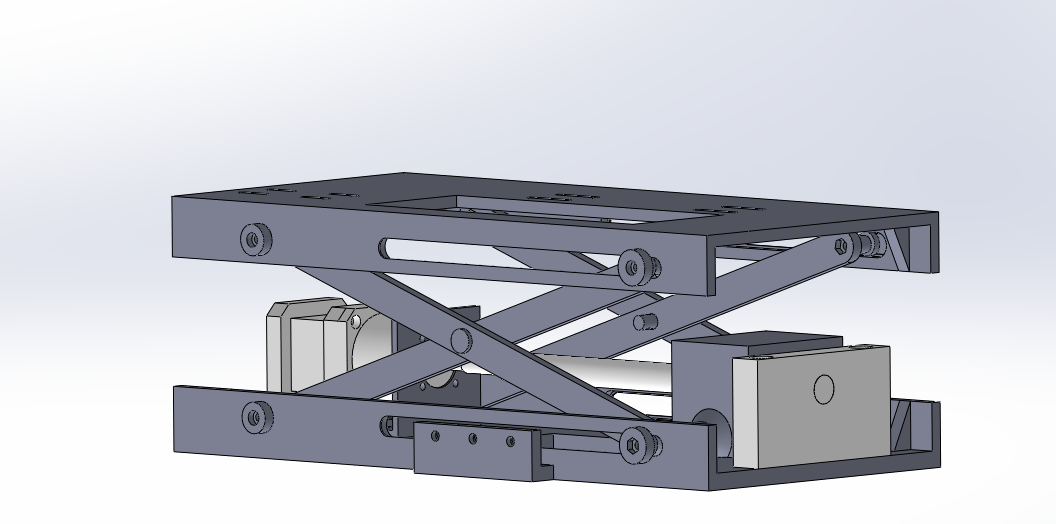
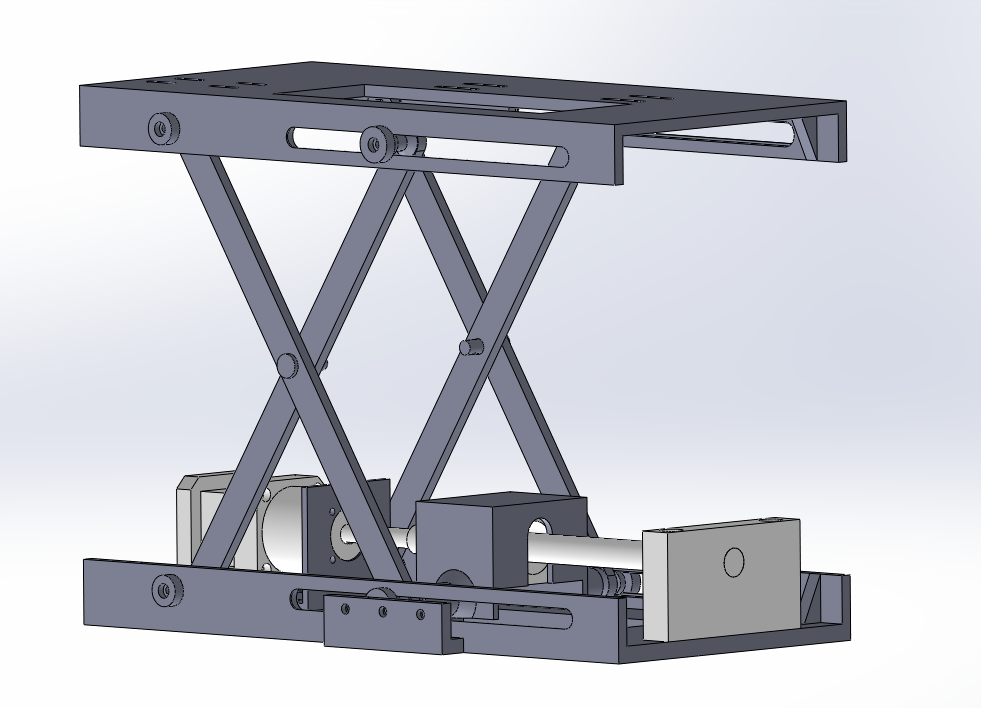
 Definition of cooperation relationship of motion mechanism
Definition of cooperation relationship of motion mechanism
你好!我想实现图中所示机构的运动模拟,当电机旋转时,它驱动整个机构抬起。你有什么好的解决方案吗?
MU on Convyor
Hi
When i use Conveyor to convey MUs,When MUshas been in motion for a certain period of time, it will have an offset, such as its own rotation,and will not follow its normal trajectory,Is there any way to fix this deviation of MUs by specifying that it only follows the path of the conveyor belt
- I have modified the Rigibody component of MU to limit its rotation
thanks!
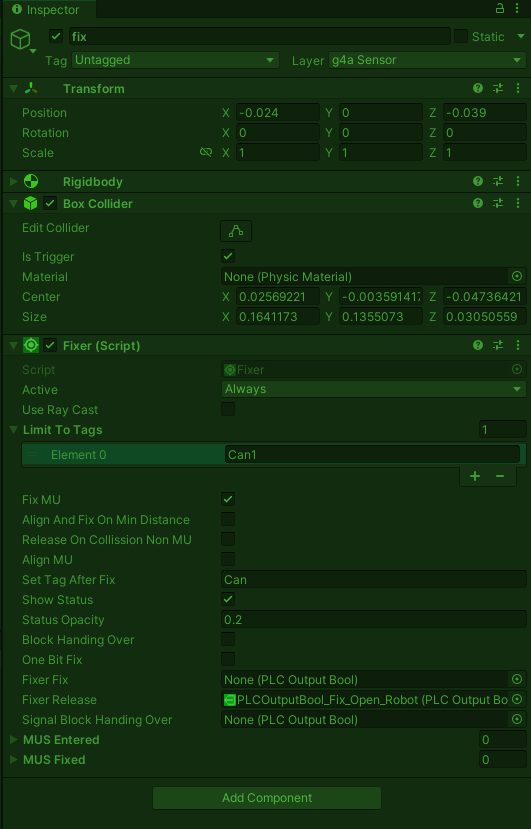
Two Fixer fix MU
Hi
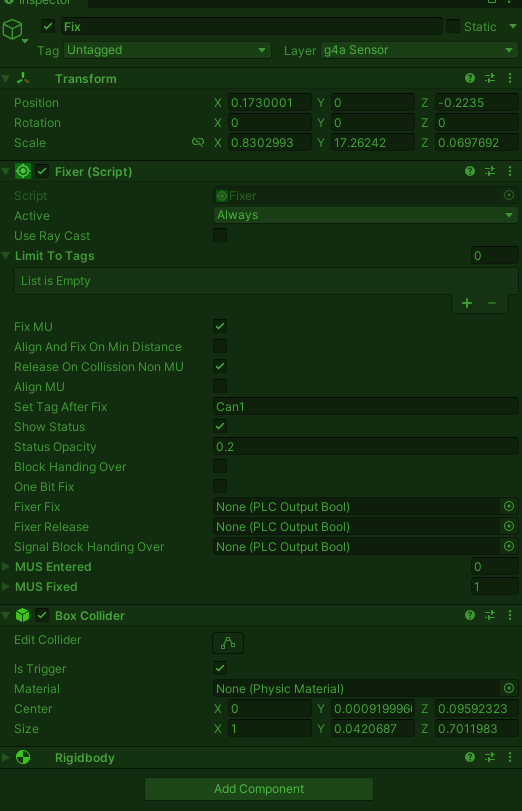
Now,i met a problem about Fixer,I want Fixer1 Fix MU ,and MU is fixed by Fixer,
When i use fixer2 based on Signal release, MU will Drop
When i use release On Collission Non MU, MU cant fixed by Fixer1. It toggles back and forth between captured states
Maybe When release Fix2,Mu maybe drop,and it's been fixed again
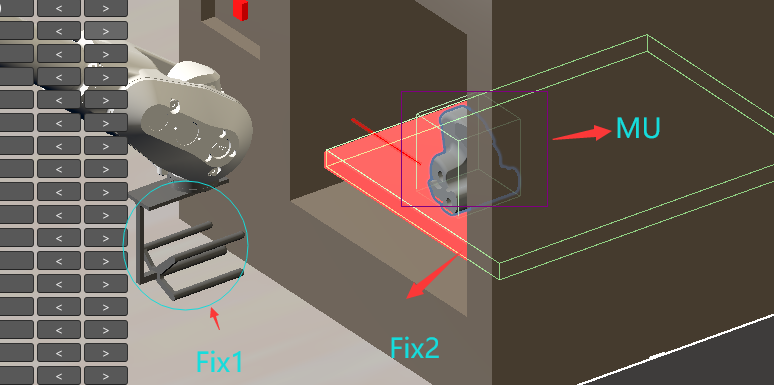
Fixer1
Fixer 2
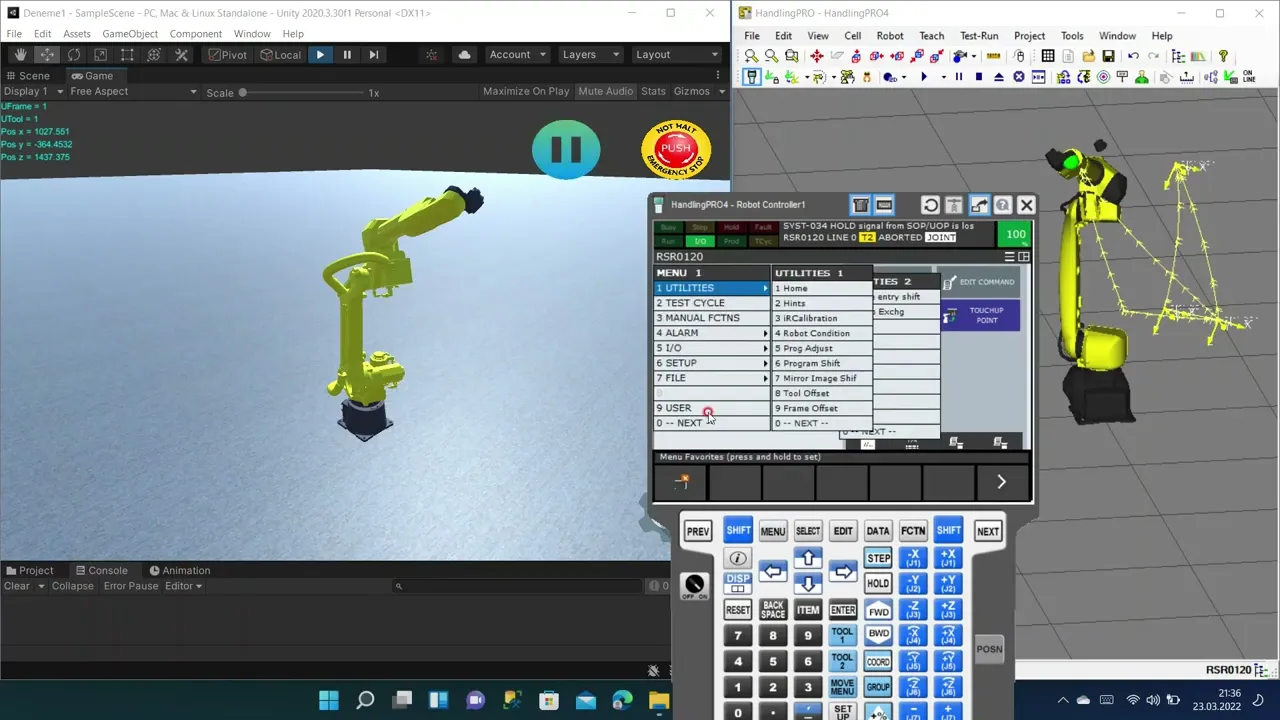
Robot IK Edit windows Lost
Hi
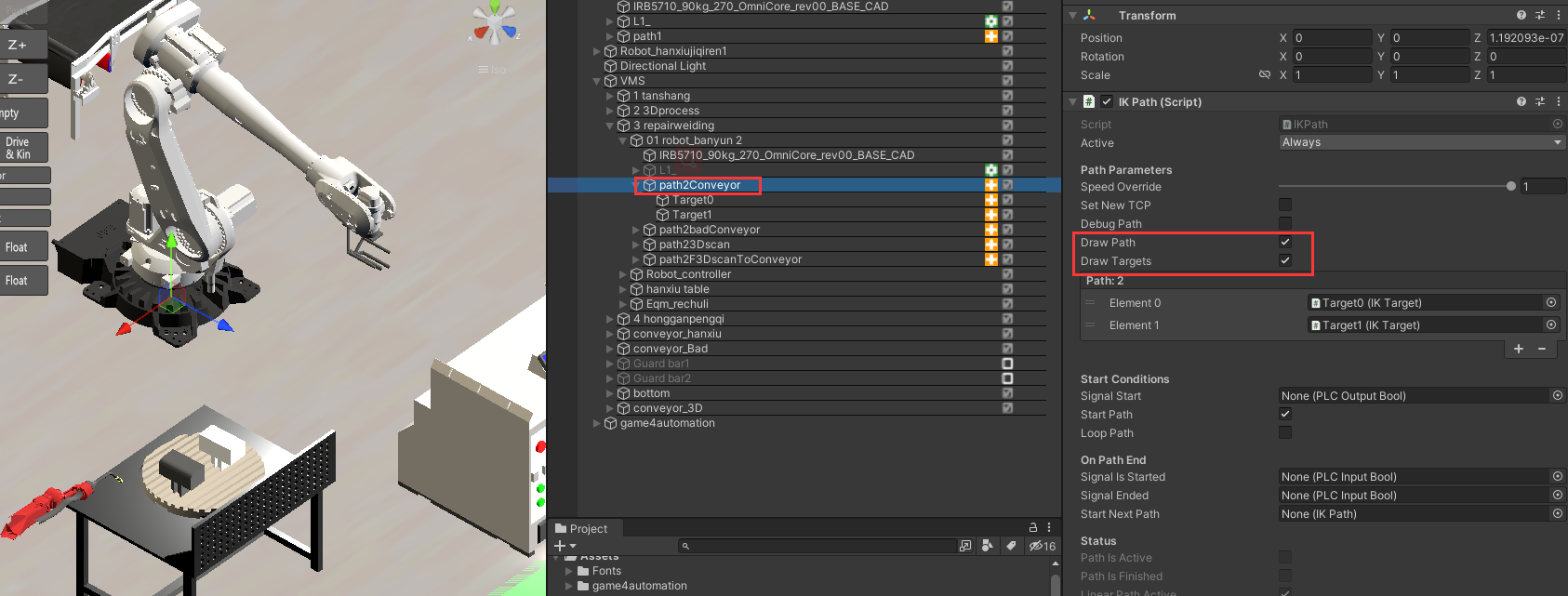
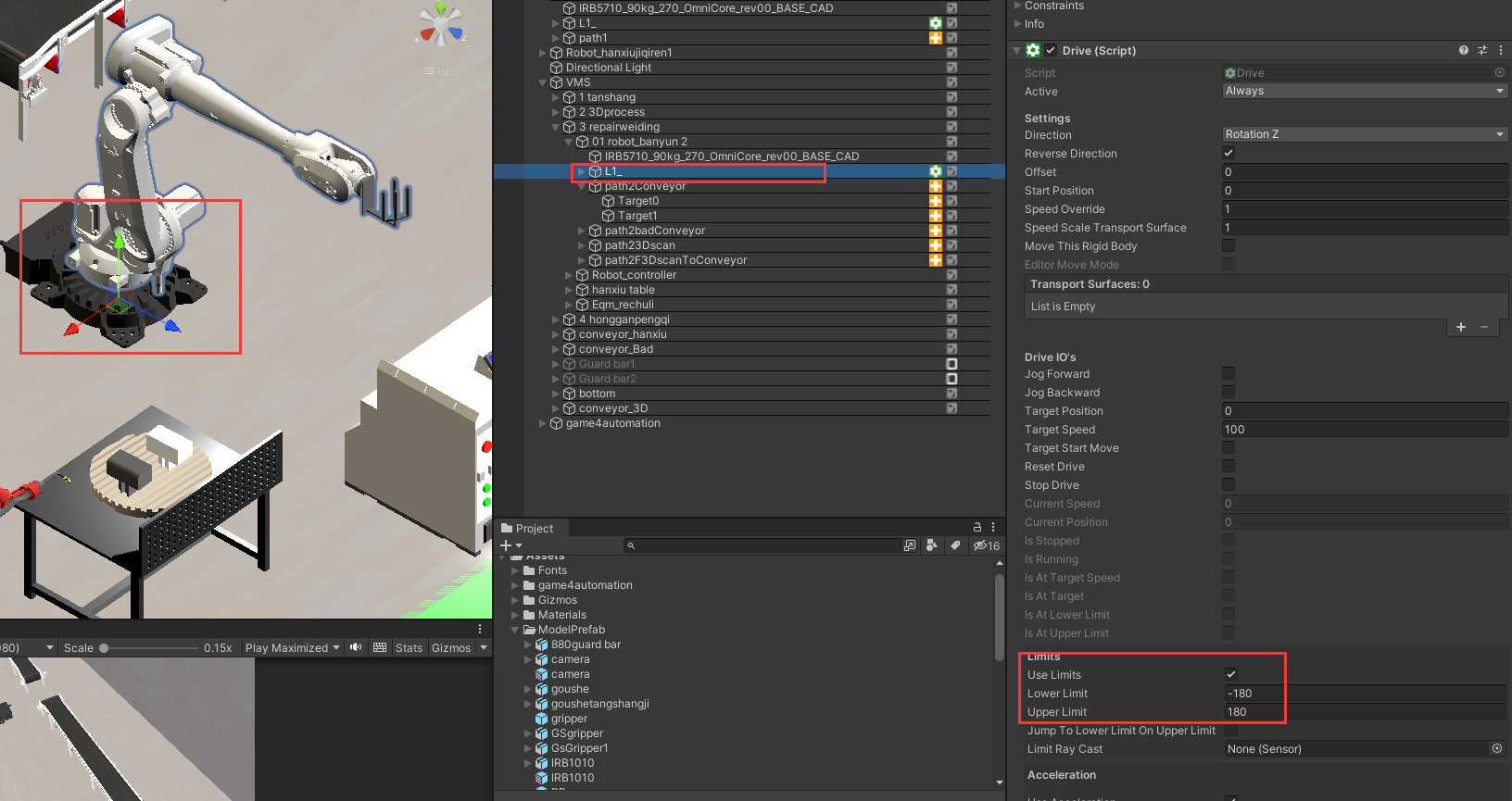
Today, after I opened the scene, I found that their editing window did not display, such as the path of the robot, joint restrictions of the robot, etc. I exported the project to another computer, and it displayed normally after opening. Meanwhile, I also tried to restart the project, but it didn't seem to work.
Today
Yesterday.when i click Path,the Path Line show normaly
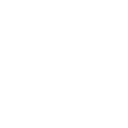
robot Grip with no finger
Hi
i want to grip MU based on Grip scrip,but my grip have no finger!
i study from standard demo。Based on sensor ,collider,direct grip,etc but i cant realize grip Mu Function
and i study from Grip MUS demo,i found noFingergrip demo,but it realize it based on Gripper Script
Q1:when i want to realize Grip MUs with no Finger,which i should to chose,Grip or Gripper,
Q2:In Grip script,Directly grip,Is it that when MU‘s Box collider and grip‘Box collider collide, i realized grip function?
Q3:Can you give me a detailed instruction document about NoFingergrip based on Grip scripts?
MUS
gripper no fingers
Looking forwaring to your reply!
 3 D Unity Asset Store Absturz Windows 11 Prof.
3 D Unity Asset Store Absturz Windows 11 Prof.
Hallo Thomas Ich muss mein Rechner neu mit Windows 11 Prof verwenden. Nach der Installation 3 D Unity und Game 4 Automation Boot Fehler mein System startet nicht mehr. Auch ein Upgrade von Windows 10 auf Windows 11 verursacht diesen Fehler. Nach Reparatur mit Bit Logger Schlüssel Startvorgang wieder Okay aber alle Unity und Game 4 Automation wurden gelöscht.
Ist hier etwas bekannt? Gruss Bruno

Hello Thomas,Can I use Ethernet IP get every axis float value from RoboGuide?
If I want to do as the video shows(
)He used Ethernet IP too。But witch type should I choose?Thank you very much。

Hi, I never tried Roboguide and EthernetIP. Are you sure that roboguide is able to communicate over EthernetIP. We don't have RoboGuide - so we realy don't know what do do in your case. Sorry.
Why is my robotic arm model falling apart?
I used the cad import tool to import my manipulator model, but after running my manipulator model fell apart, how can I solve this situation?

I think the pivot points of your Axis1... Gameobjects are not where they should.
If needed you need to set empty gameobjects with the correct pivot points - like in the robot data sheet. After this you can put your meshes in. Drives are always rotating around pivot points. Please turn on the pivot point visualization in editor mode.

 Pick based on Sensor
Pick based on Sensor
Hallo,
ich habe dem Würfel einen Sensor und Box Collider zugeordnet und will dass der Greifer ihn aufnimmt sobald der Würfel im Bereich des Greifers ist. wo ist der fehler? anschließend soll der Greifer den Würfel in eine Box ablegen per "place load on mu".
Simit Diagramm
Hallo,
Ich verstehe nicht ganz warum der X1 Wert mit 57,3 multipliziert wird.
Wie kommt der Wert zur stande?
Ich bemerke bei meinem Roboter eine veränderte Bewegung sobald ich den Multiplikator verändere.
Wie richte ich es so ein, sodass der Roboter in Unity EXAKT die selbe Route abfährt wie der Roboter aus Robotstudio?
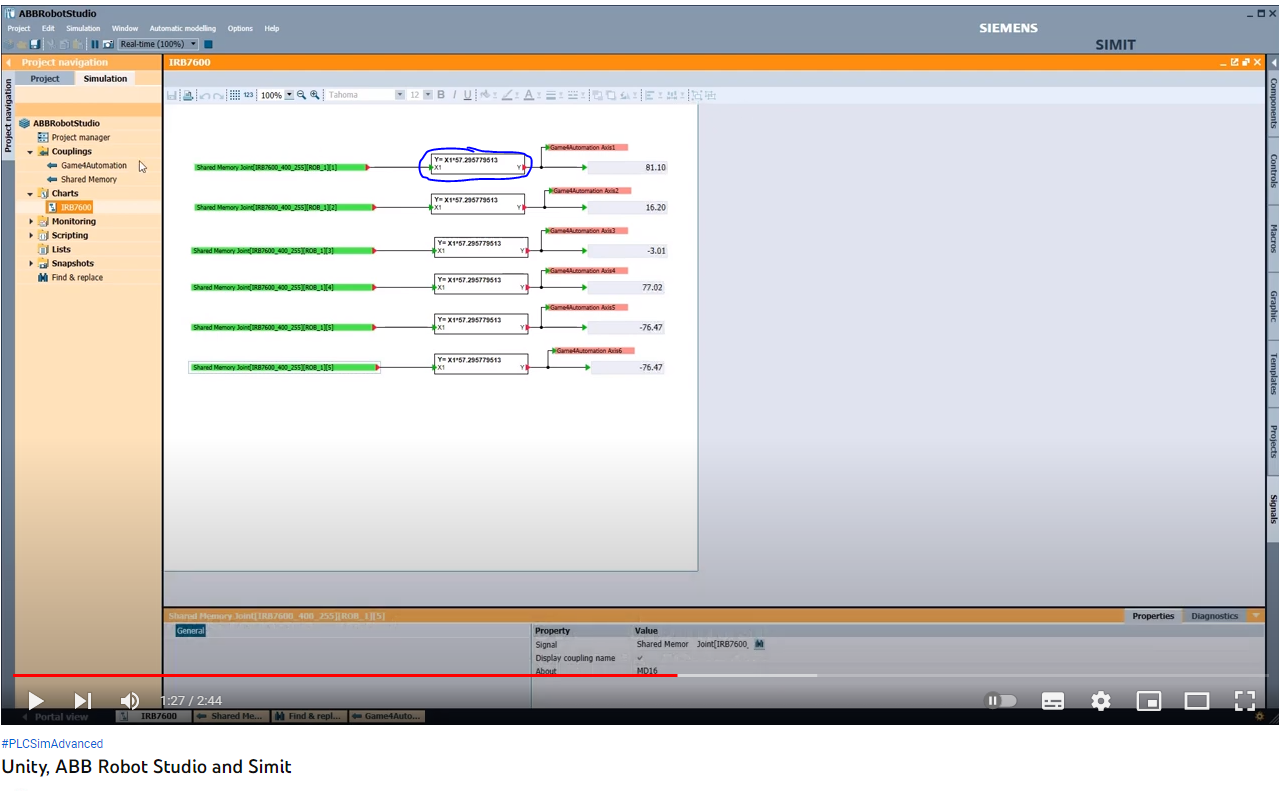
Simit muss an realvirtual für rotatorische Achsen Grad übergeben (als Float).
Wenn nun der Roboter die richtige Kinematik (Achspositionen) sowie die richtige Achsrichtungen hat so ist die Bewegung 1:1 identisch.
Was ABB RobotStudio übergibt weiß ich nicht genau. Wichtig ist, dass die Nullpunkte der Achsen gleich definiert sind (ansonsten muss mit einem Offset gearbeitet werden). Es gibt ja auch noch Radianten als Winkelmessung. Dann muss entsprechend umgerechnet werden.
Customer support service by UserEcho
