Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!


 Bauteile beim import Gespiegelt
Bauteile beim import Gespiegelt
Ich habe das Problem, dass alle .Step dateien die ich importiere im Editor gespiegelt dargestellt sind. Ich habe .Step-Dateien von verschiedenen Quellen getestet. Jedoch ist jede gespiegelt. Hat noch jemand dieses Problem oder eine Lösung dafür?
mfg

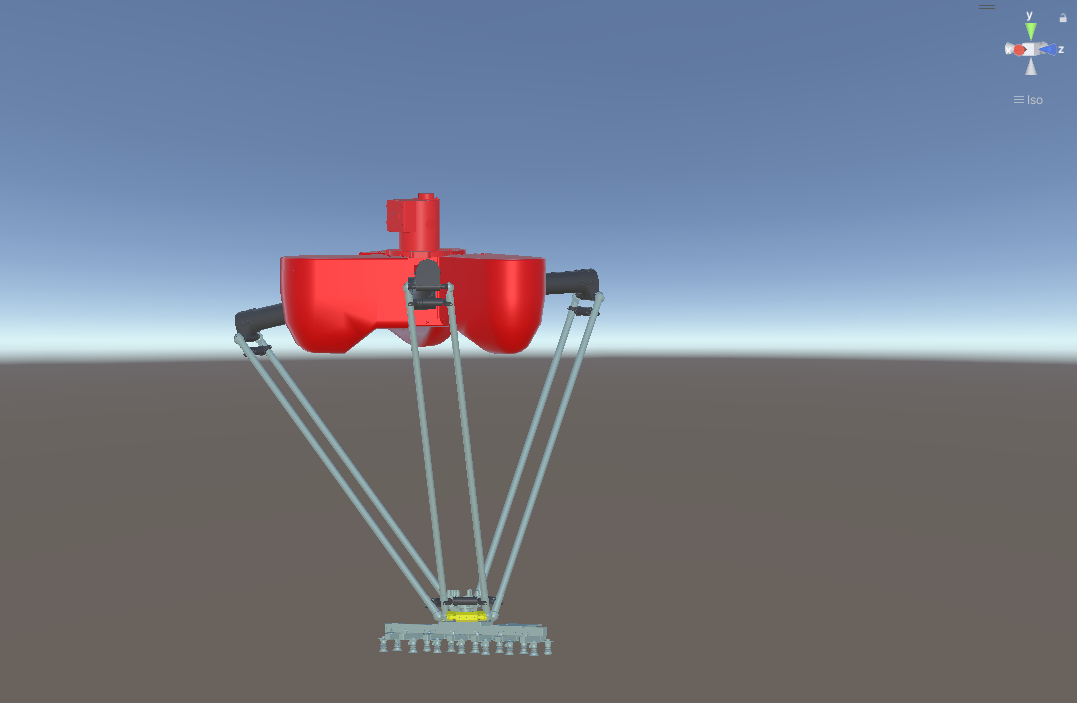
Robot IK: Holding the rotation of TCP between targets
Hello,
how can the robot hold the rotation of TCP between targets?

Inverse Kinematics broken behaviour
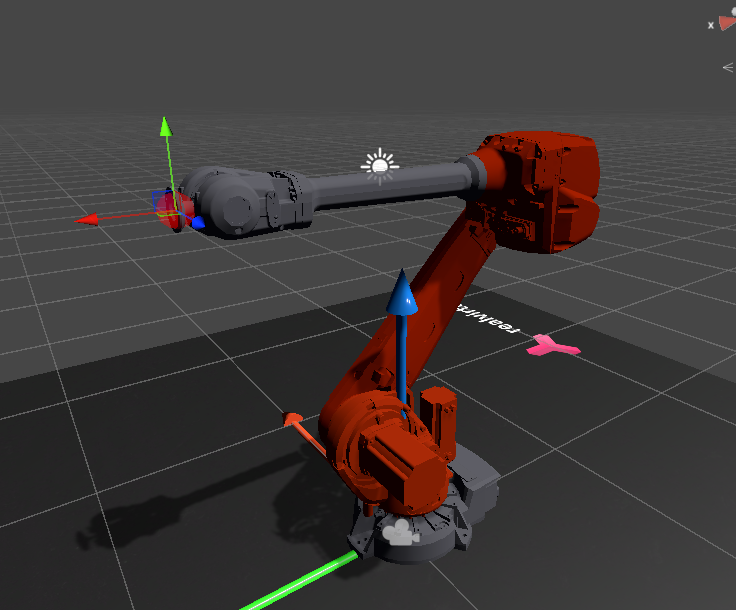
Following the entirety of the the RVIO IK tutorial, the robot is showing incredibly broken behavior. The target is red and if you move it around until the IK responds. It behaves in a really unpredictable manner that makes it very hard to find out the source of the problem.
The 6 axis robot i am trying to use.
The hirerarchy
The strange behavior
I have tried "remapping" the entire robot from scratch, using a different model that I fine tuned in blender. And also tried messing around with the import coordinates and rotation. Any help is highly appreciated.
Why PlcSimAdvanced doesn't connect to plc markers
Hello,
I realized that PlcSimAdvanced isn't importing plc marker signals. Only Inputs or Outputs.
Is there really no way to use markers or data block signals?
Best regards
Andreas
OPCUA Node Connection Error
Hi, I'm trying to read and write value of nodes from OPCUA Server using realvirtual Pro 2022, and here is the situation:
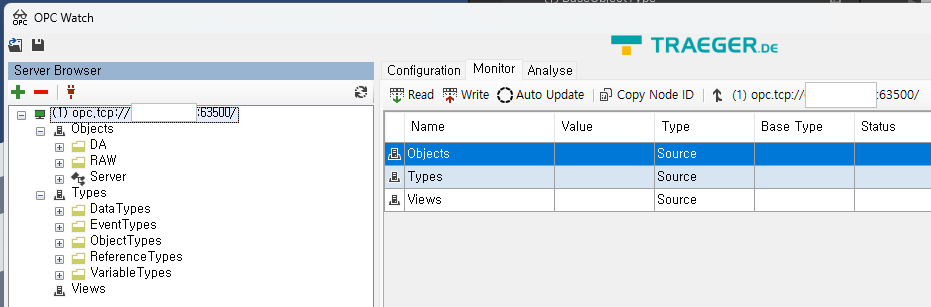
1.OPCUA server connection works good, read and write also works good on OPC Watch.
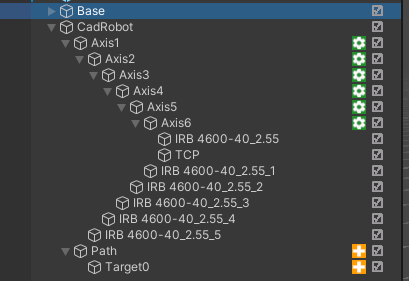
2.In Unity Editor (2022LTS 3.45 + realvirtual Pro 2022), it also successfully Import all the 63 Objects of Top node 'ns=3;i=2269' (LNGDT_FI3080.PV)
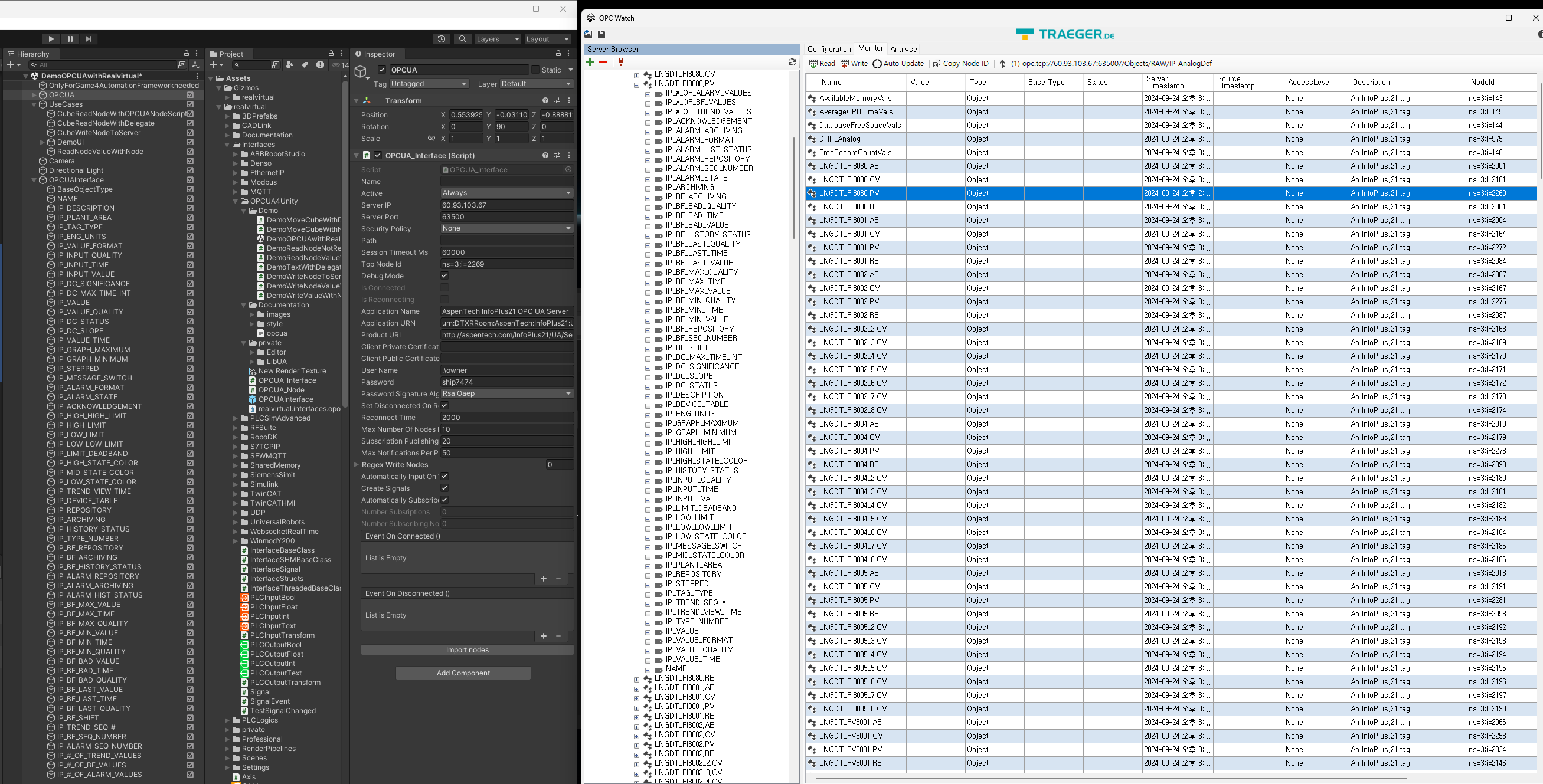
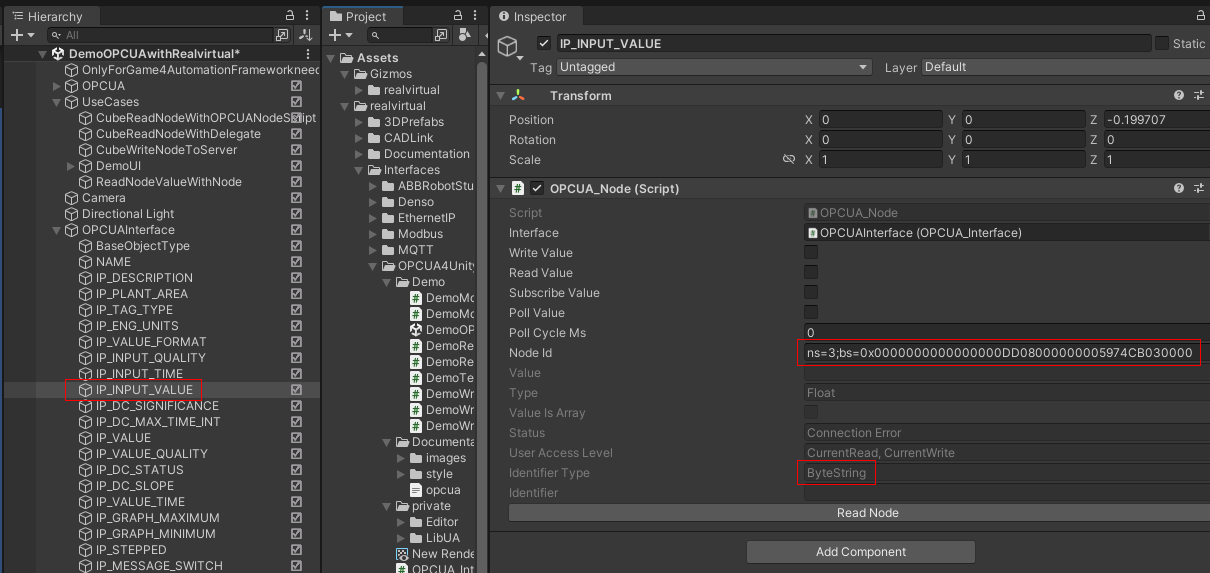
3.However, there is no value has been properly imported for ALL of the nodes. (ex, IP_INPUT_VALUE)
4.I checked the Node ID in OPC watch for the same object (IP_INPUT_VALUE), and I see the different type of the Node ID;
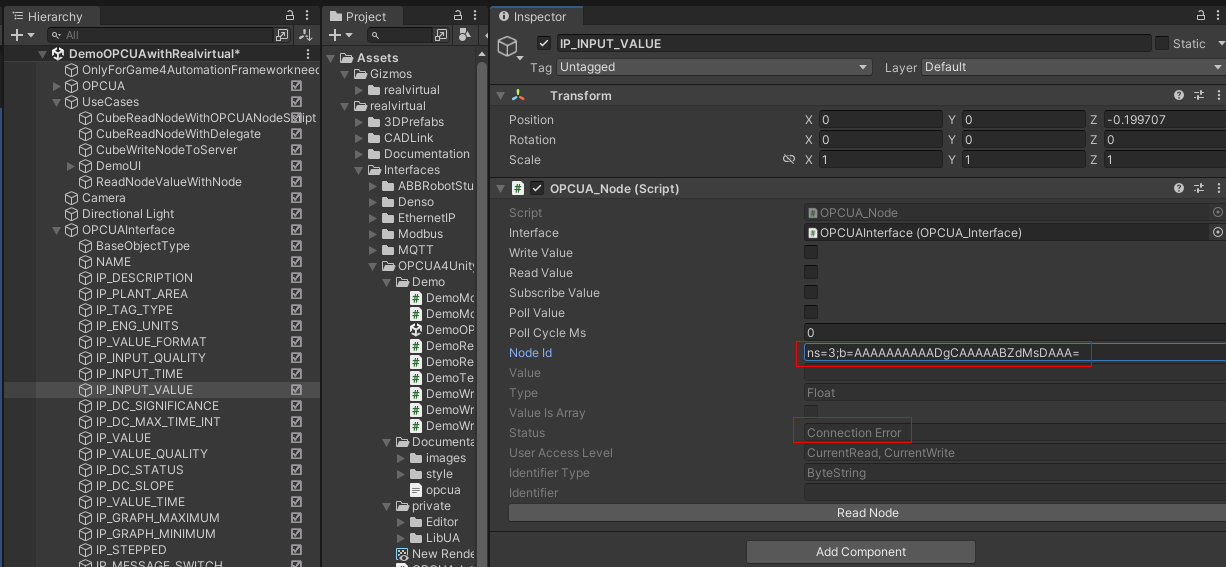
1) OPC Watch: ns=3;b=AAAAAAAAAADgCAAAAABZdMsDAAA= (Hexadecimal String)
2) Unity Editor: ns=3;bs=0x0000000000000000E008000000005974CB030000 (ByteString)

5.So I changed the Node ID in Unity Editor from ByteString to Hexadecimal String, still doesn't work. Is there any way to fix this problem?

How to cummunicate with an ABB robot through the Externally Guided Motion (EGM) interface?
Hi,
I'm trying to build a simple Digital Twin of an ABB robot. I'd like to use the Externally Guided Motion (EGM) interface provided by ABB to realize the real-time fast communication between the robot and my Unity sence with the help of realvirtual.io. However, there is no EGM interface in realvirtual.io. Does it mean that I have to build a ABB EGM custom interface by myself? I'm a green hand of Unity and C#. If I have to do that by myself, apart from a brief introduction to "custom interfaces" in the documentation of realvirtual.io, are there any other effective reference materials? Could you please provide some advice and assistance? Thanks a lot.

Hi,
If you're unfamiliar with Unity and C#, I highly recommend learning the basics first. Implementing an interface without this foundational knowledge would be very tough.
Regarding the suggestion to "use any of the existing interfaces as a blueprint and delete everything that is PLC/interface-specific"—what I meant is that you should reuse the C# code (the one script) of an existing interface and remove everything that's specific to that particular interface inside this script. However, doing this requires a good understanding of C# so that you can navigate and comprehend the code.
The parts you remove need to be replaced by C# code tailored to your custom interface (in your case, EGM, where you seem to have some examples on Github).
That said, simply copying and pasting code won't work in my opinion. You need a decent level of C# knowledge to properly implement and modify a custom interface.
Best regards
Thomas

 Fehler bei Plattformwechsel von Windows zu Android für Meta Quest 3 Build
Fehler bei Plattformwechsel von Windows zu Android für Meta Quest 3 Build
Hallo zusammen!
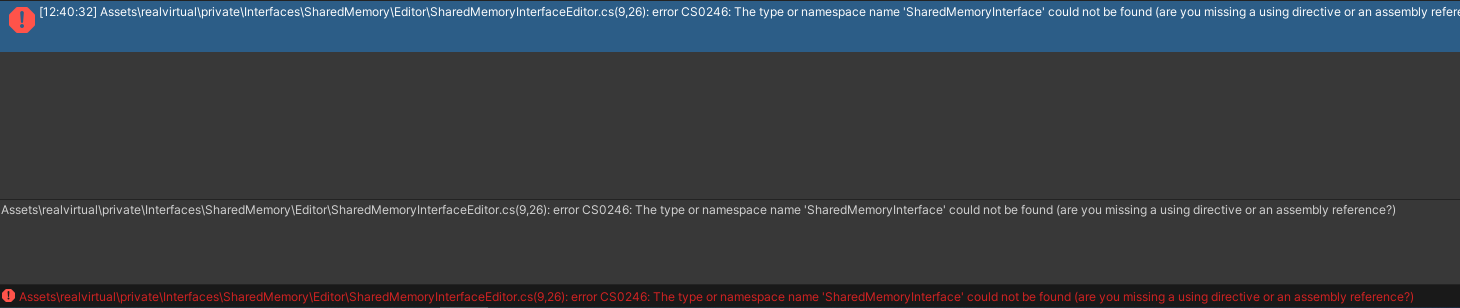
Diesen Fehler bekomme ich direkt beim Plattformwechsel von Windows zu Android. In dieser Szene befindet sich kein realvirtual GameObject und auch keine Assets dergleichen. Das Paket ist jedoch natürlich im Projekt enthalten.
Eigentlich sollte über die AssemblyDefinitions SharedMemory für Android ausgeschlossen sein. Vom Pfad her scheint es sich um eine ältere Version zu handeln. Um welche realvirtual Version handelt es sich. Notfalls einfach den Folder realvirtual/private/Interfaces/SharedMemory löschen.
Problem with GuidedMu when MU has a fixed MU on it
Hello,
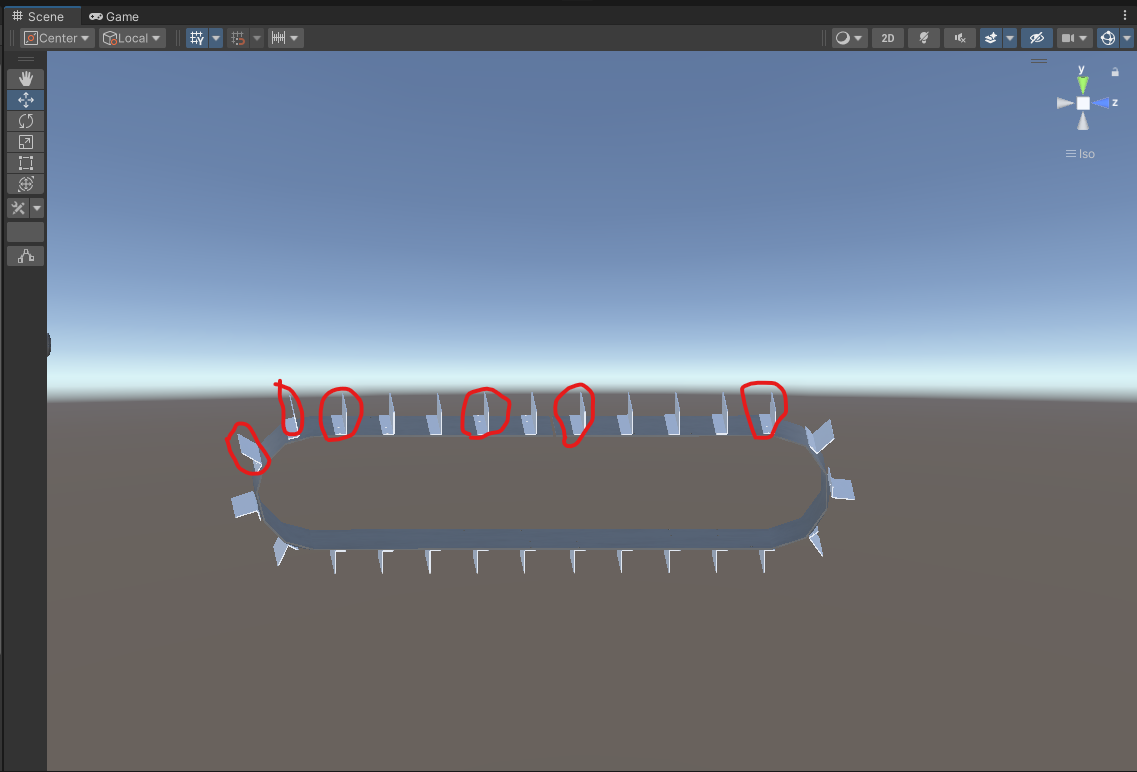
I use a guided transport system with a GuidedMU on it.
This MU (WT-2) is getting loaded with another MU (Can) which gets fixed on it by a fixer.
After the WT-2 is lowered again it should actually get moved by TransportGuided system. But it is just shaking a bit, moving barely. After I delete the Can which is fixed on it, the WT-2 starts moving immediately.
The WT-2 has a GuidedMU (Script) on it and the property "IsFixed" is true when the WT is lifted and false again after it's lowered and should move.
Sometimes it's working though the WT-2 gets moved normal with the Can fixed on it but somestimes not.
I'm not sure where the issue is and try to understand why it is not working properly.
Thank you in advance.
Andreas
Customer support service by UserEcho
