Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!

 Questions about the use of s7 PLC
Questions about the use of s7 PLC
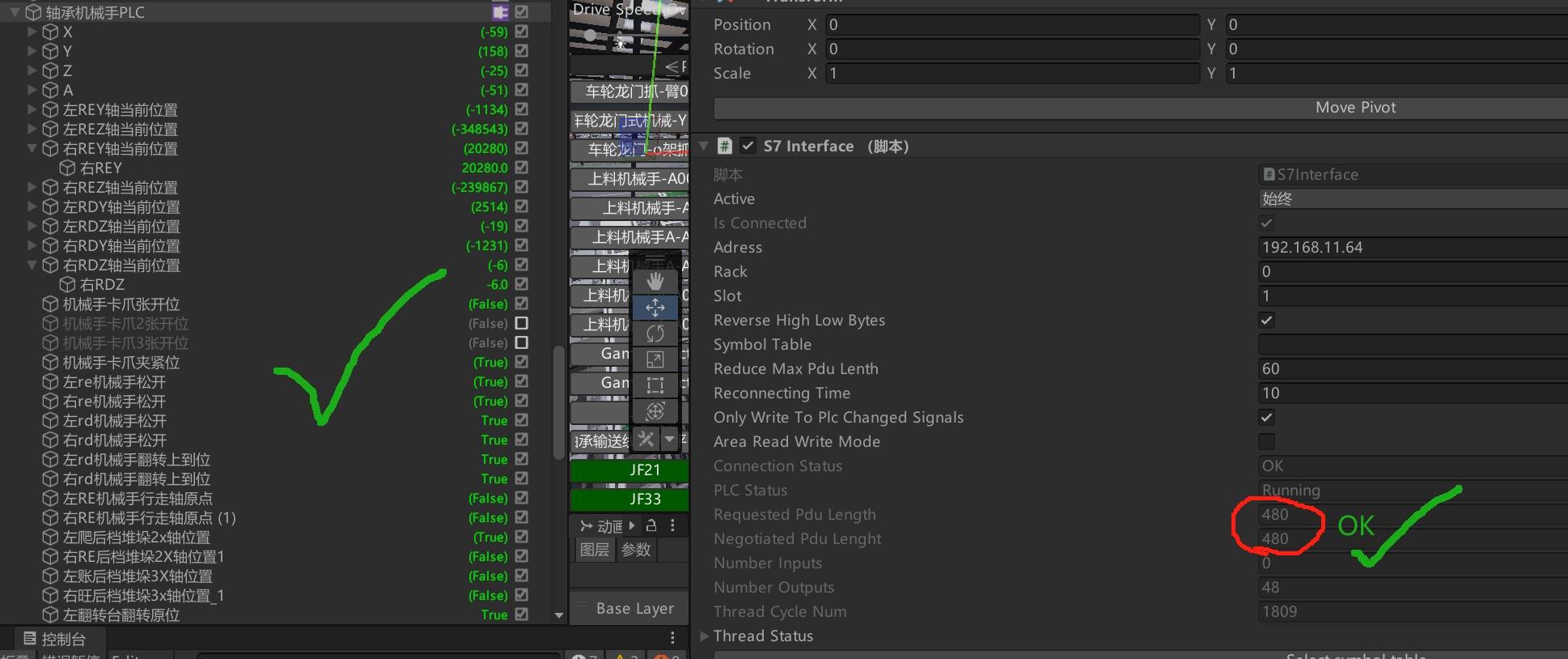
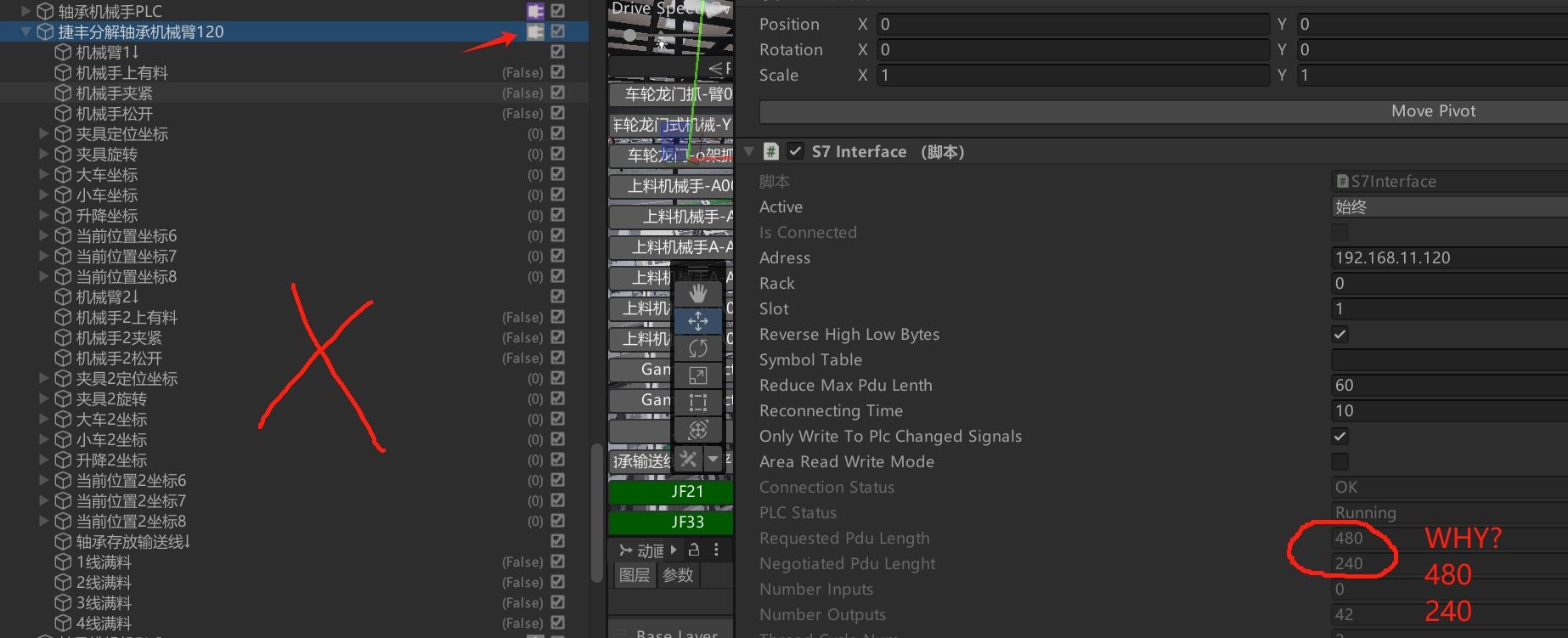
When using S7Interface, some S7Interface can connect to many points, and some S7Interface will be disconnected if the number of connections is too large, please see the picture, as if: Negotiated Pdu Lenght is related to this value. May I ask how Negotiated Pdu Lenght is set? Why is it 480 or 240? If Negotiated Pdu Lenght is 240, too many signals cannot be connected.
There is also a question about: how to use the Area Read Write Mode, if I need to read 56 points from the PLC's DB block and write 12 points, how should I fill in the configuration.
Looking forward to your reply very much!
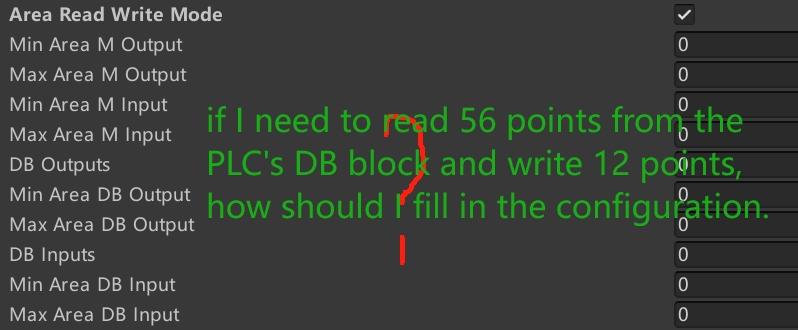

Hi, I can't tell you in detail why the negotiated Pdu lenght is like that. We use Sharp7 as a basis library for the S7 communication. I think this defines the length of the telegrams but it does not defines the number of the signals. If needed multiple telegrams are send for covering all signals. On AreaReadWrite Mode you sould enter min and max adress - so if your DB is 100.X to 140.X you should enter 100 and 140.
VR Headset and HMI
Hello, I have a question: Is it possible to display the HMI components on a VR headset with XR Origin?
Hi, this is possible but you might need to do changes in Unity canvas or other things. All we do is source code open so you can adopt it to your needs.

Ethernet IP not connecting, Allen Bradley PLC
I just bought this software to use the Ethernet IP interface to a Allen Bradley, I am up and running in Visual studio using the same Ethernet and can get tags there, but I need it in Unity, please help.

Enquiry About the twin pack bottlecapper
Hello,
I'm interested in purchasing the OPCUA4UNITY package, but I don't have access to any Siemens TIA Portal-connected devices. Could you please inform me how I can utilize this package without a physical PLC? Additionally, does this package include the TwinBottleCapper, or would that need to be acquired separately?
Thank you!

Bag is not moving with RGV
A693 - Windows, Mac, Linux - Unity 2022.3.3....mp4
I want to move the bag which is shown in project with RGV. But unable to do it. When i am giving forward command to RGV, RGV is moving forward but the bag is not moving with RGV. Last time you had shared a link for reference (https://doc.realvirtual.io/components-and-scripts/motion/transportsurface#transport-surfaces-and-unity-physics).
But i couldn't get it. Please suggest the solution step by step.
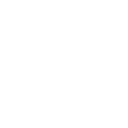
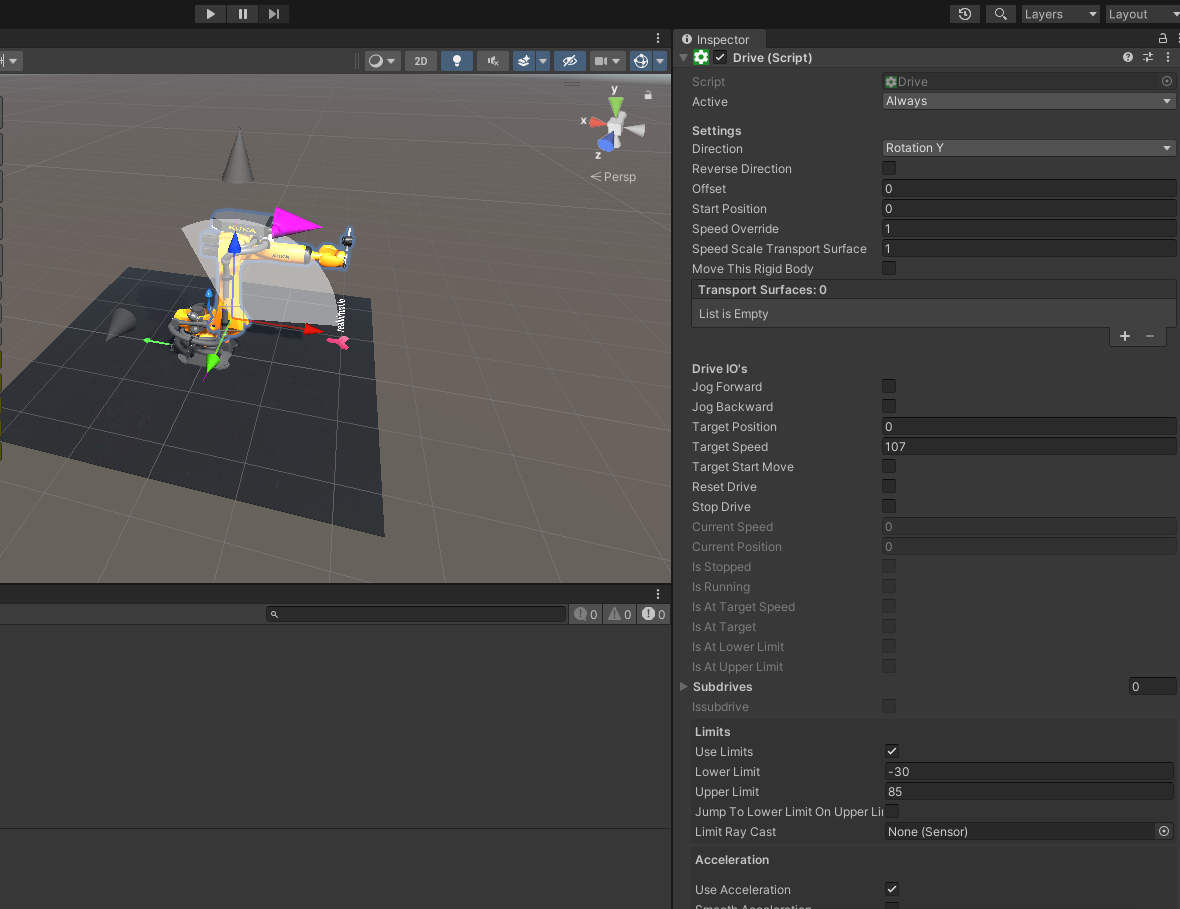
Read the position of the free state drive or joint
Hello. I need a quick response if possible.
I am using the RealVirtual Professional version.
How can I achieve the desired goal in the image? Should I use a Joint or Drive?
For Drive, you have Drive_MeasureSpeedPosition, and that’s great.
Is it possible to disable the Drive so it can rotate freely?
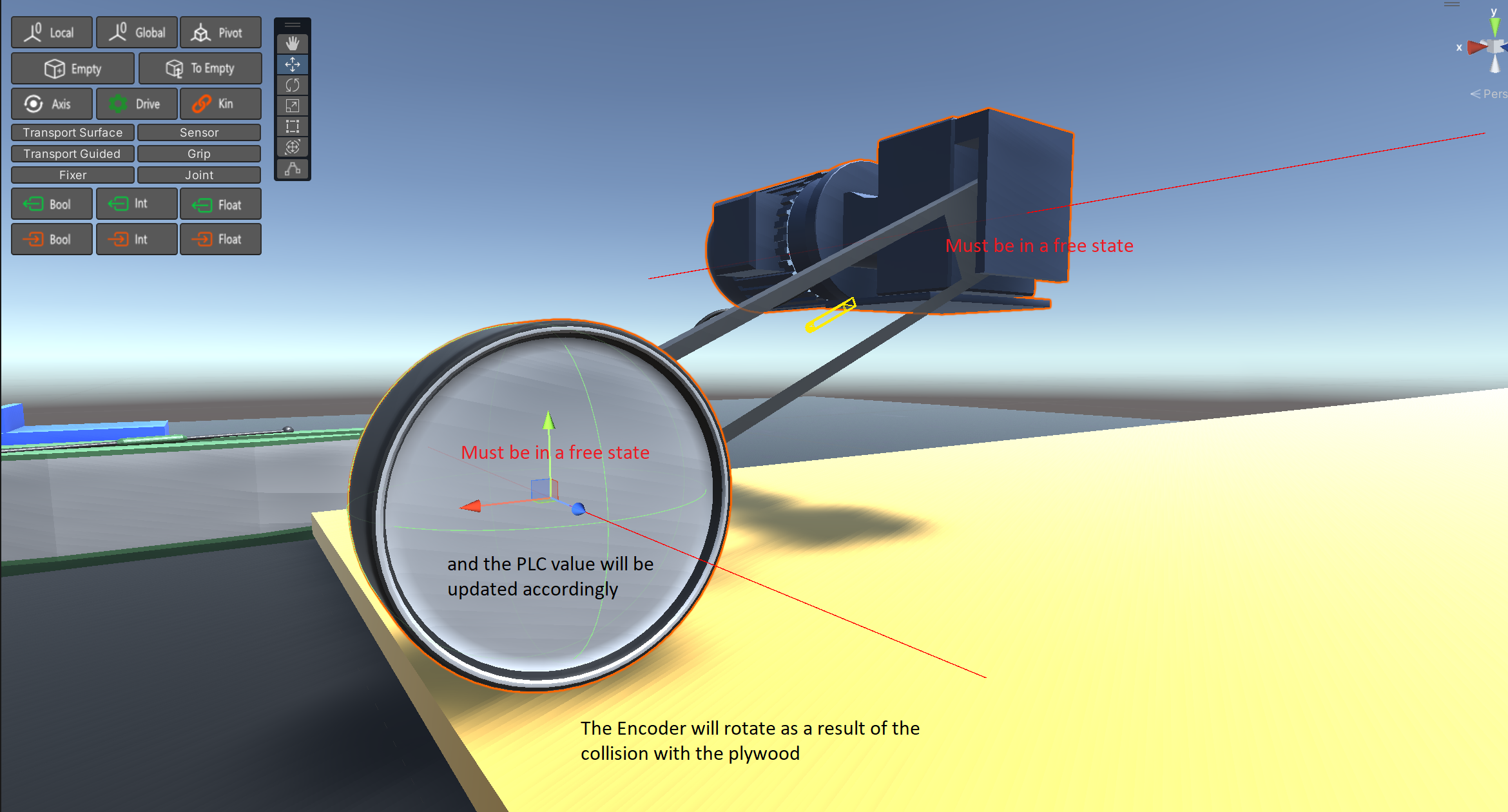
Connection with the PLC is okay, but the values never update
Hello everyone, I’m new to this forum. In case anyone has a similar problem where the values never update, but the connection to the S7 PLC is successful. Here is how to solve this problem. I hope it will be helpful to someone.
Working with Offsets
Hello Realvirtual.io Team,
in the robot configuration I deviate by -90 deg. on the Axis 2 and +90 deg. on Axis 3. Intuitively I tried to configure this with an offset, but as soon I try to calculate the inverse kinematics again and do path planning, things don't work as expected.
Range Axis2: -120; -5
When I add the offset of axis 2 by hand (lower limit: -30; upper limit: 85) then things work as expected, but since the robot will be connected via OPCUA Plugin, I don't know how to add the offset otherwise.
Robot: Kuka KR2700 prime
Thank you for your help!
Hi, the "home" position (=position in Editor Mode) for our IK must be always this
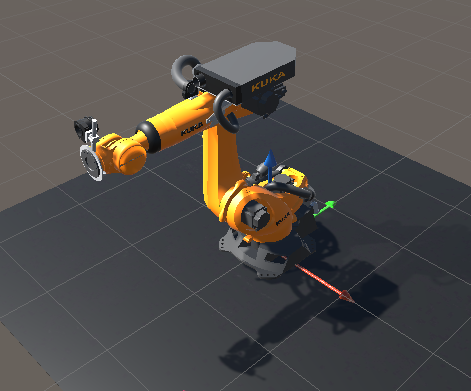
Otherwise the IK will not work.
Ideally this would be also the OPCUA Positions where each drive has Position 0. If not you can work with Offsets in the Drives. But youh should only use Offsets for OPCUA and not for our included inverse kinematics.
Maybe it is best to define two robots. One using our IK with the correct settings and one getting the Axis values over OPCUA.
If you thing that our IK is doing something wrong (your last picture) - please send us your project where we can check this to: https://realvirtual.io/send
Please only include what we really need and set the scene to a situation where we can see directly your problem.
 Fehler bei Kuka .step datei import
Fehler bei Kuka .step datei import
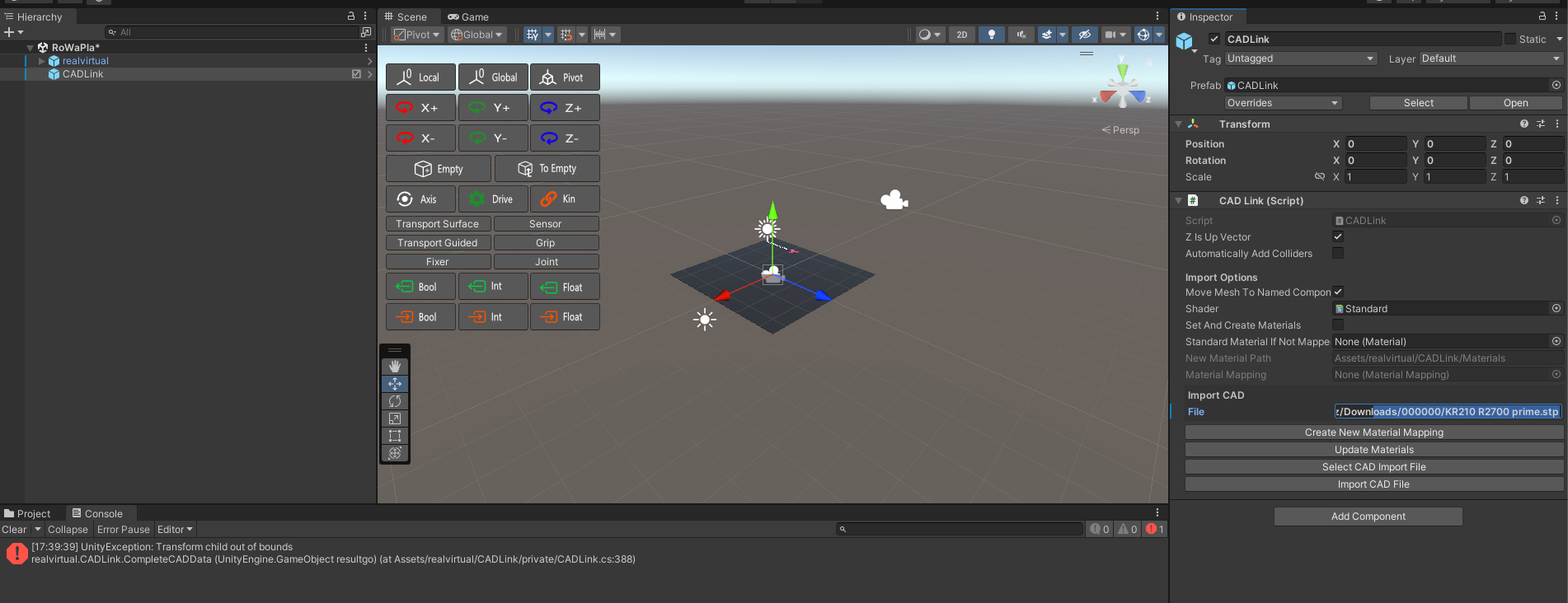
Ich erhalte folgenden Fehler beim importieren von einer Kuka Step Datei in Realvirtual.io.
Unity Version: 2022.3.25f
UnityException: Transform child out of bounds
realvirtual.CADLink.CompleteCADData (UnityEngine.GameObject resultgo) (at Assets/realvirtual/CADLink/private/CADLink.cs:388)
realvirtual.CADLink.ImportCad () (at Assets/realvirtual/CADLink/private/CADLink.cs:238)
System.Reflection.RuntimeMethodInfo.Invoke (System.Object obj, System.Reflection.BindingFlags invokeAttr, System.Reflection.Binder binder, System.Object[] parameters, System.Globalization.CultureInfo culture) (at :0)
Rethrow as TargetInvocationException: Exception has been thrown by the target of an invocation.
System.Reflection.RuntimeMethodInfo.Invoke (System.Object obj, System.Reflection.BindingFlags invokeAttr, System.Reflection.Binder binder, System.Object[] parameters, System.Globalization.CultureInfo culture) (at :0)
System.Reflection.MethodBase.Invoke (System.Object obj, System.Object[] parameters) (at :0)
NaughtyAttributes.Editor.NaughtyEditorGUI.Button (UnityEngine.Object target, System.Reflection.MethodInfo methodInfo) (at Assets/realvirtual/private/Tools/NaughtyAttributes/Editor/Utility/NaughtyEditorGUI.cs:167)
NaughtyAttributes.Editor.NaughtyInspector.DrawButtons (System.Boolean drawHeader) (at Assets/realvirtual/private/Tools/NaughtyAttributes/Editor/NaughtyInspector.cs:188)
NaughtyAttributes.Editor.NaughtyInspector.OnInspectorGUI () (at Assets/realvirtual/private/Tools/NaughtyAttributes/Editor/NaughtyInspector.cs:52)
UnityEditor.UIElements.InspectorElement+<>c__DisplayClass72_0.b__0 () (at /Users/bokken/build/output/unity/unity/Editor/Mono/UIElements/Inspector/InspectorElement.cs:713)
UnityEngine.GUIUtility:ProcessEvent(Int32, IntPtr, Boolean&) (at /Users/bokken/build/output/unity/unity/Modules/IMGUI/GUIUtility.cs:203)
Customer support service by UserEcho
