Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!

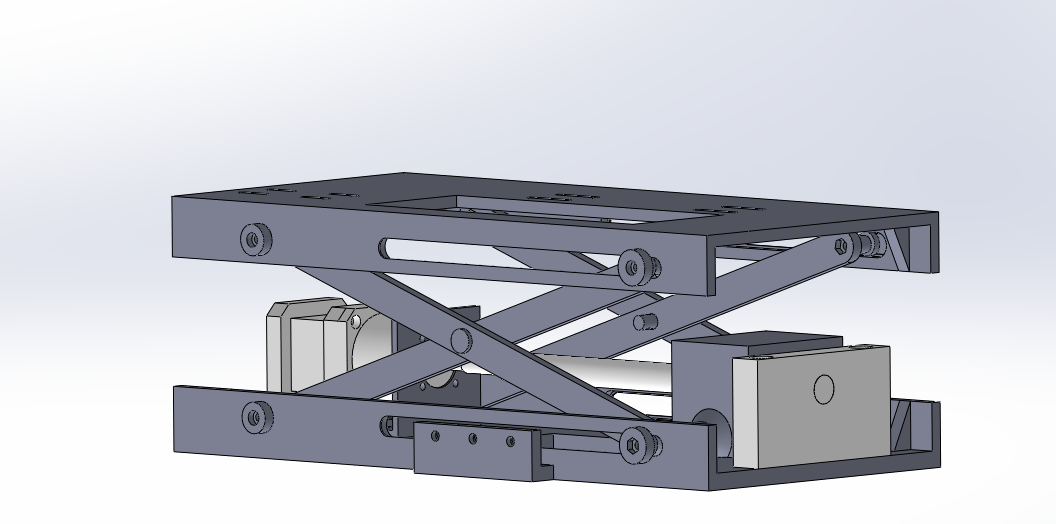
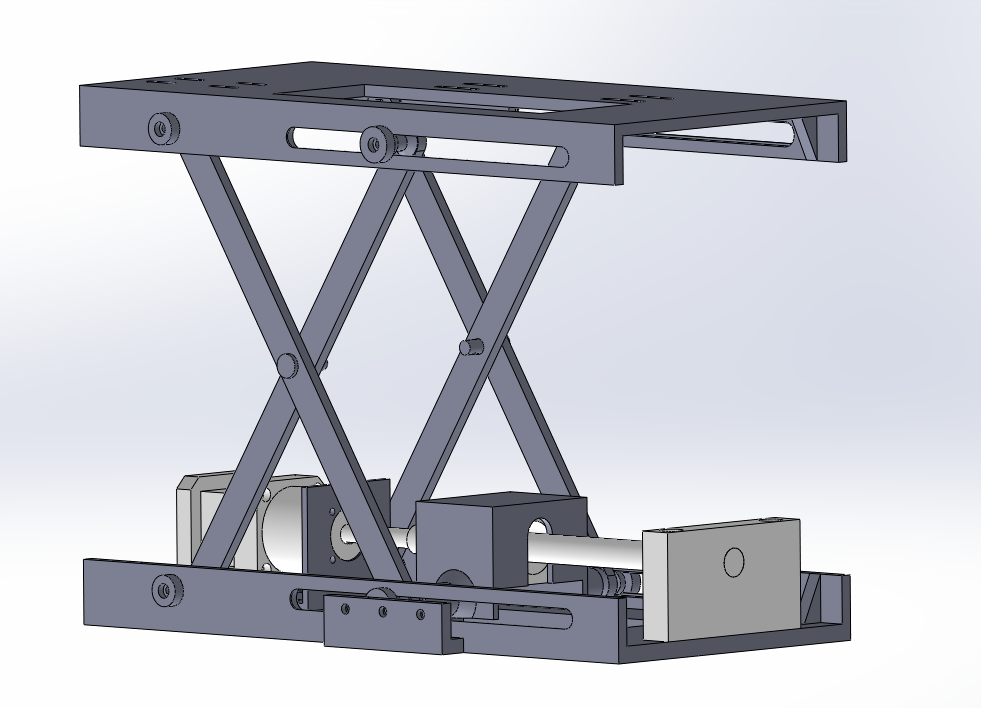
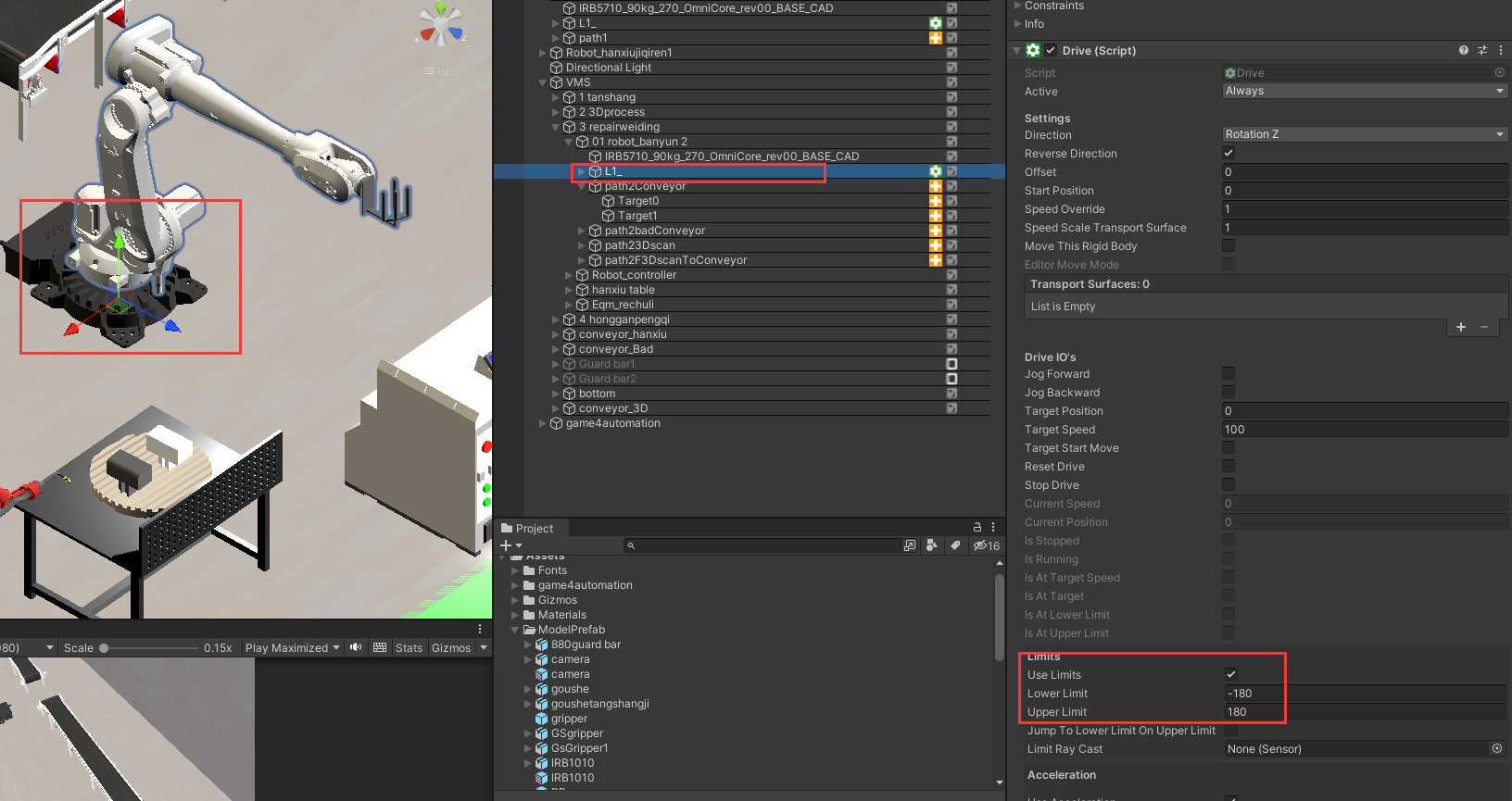
 Definition of cooperation relationship of motion mechanism
Definition of cooperation relationship of motion mechanism
你好!我想实现图中所示机构的运动模拟,当电机旋转时,它驱动整个机构抬起。你有什么好的解决方案吗?

 Connection to certificate based authentication OPCUA server
Connection to certificate based authentication OPCUA server
Hi, I’m using the OPCUA4Unity plugin purchased on the Unity Asset Store.I’m able to connect a Unity project to a OPCUA server with no certificates, but my main need is to connect it to a certificate based authentication OPCUA server. In the specific is a Basic 256 security policy.Trying to connect my Unity project to the certificate based authentication OPCUA server, filling the Security Policy field with Basic 256, I receive the following errors:
- OPCUA Interface - Connection Error Object reference not set to an instance of an object
- SocketException: A request to send or receive data was disallowed because the socket is not connected and(when sending on a datagram socket using a sendto call) no address was supplied.
Looking on the documentation I found that you specify that "Currently certificate based authentication and communication is not supported. We are working on the problem and try to find as soon as possible a solution.”
I would like to know if a new version of the plugin that supports the certificate based authentication OPCUA server is scheduled or if you have already a beta version or also a workaround for this issue.
Thank you
Animation Export?
Is it possible to export an animation of a certain duration using realvirtual.io and unity?
The animation would be fixed (the same every time) so you can use a speed multiplier, fast-forward, rewind, and choose the time using a scroll bar also while being able to navigate around the 3D scene.
Perhaps an FBX animation?
Any help would be greatly appreciated.

Hi,
this currently not possible within a build using realvirtual. You have this possibility only within unity by using the DriveRecorder. Within such a recording you can jump to certain frames. A speed multiplier is available when you start your scene in unity game mode. Using the speed multiplier within a replay of the recordering is currently not possible.
You could implement this on your own because our code is open to do so.
Regards Christin

stopping conveyors and having multiple transport surfaces
Hey I started working on this university project of creating a digital twin of physical model in lab. But I have run into some problems so the idea here is that the MU has to move to the position in front of gantry drive and then has to comeback on the same conveyor. While coming back, the turn table which is between two conveyors has to turn while also stoping TS which it has. My problems are...
1) Stopping the conveyor with drive sequence at a specific destination and for a chosen conveyor is not working.(professional licence not available for us yet!) I have used PLC signals and sensors, I can start the conveyor drives but cannot stop them.
2) Giving kinematic to conveyors is not working for me hence I have given all drive behaviours directly on CAD. Is there something I have missed for this not working?
3) And I still do not understand the movement of rotating turn table while two separate transport surfaces moving and stopping MU whenever needed. I cannot seem to be able to do them simultaneously. I have seen and tried to use parent drive but it did not work. I have also seen many videos and read manual in website multiple times but giving multiple(linear & rotational) drives and stopping them is still not possible for me.
4) is it possible to rotate the turn table only when coming back and not while moving forward? if yes, any hints to how would be great.
Thank you in advance! Moving MU
MU on Convyor
Hi
When i use Conveyor to convey MUs,When MUshas been in motion for a certain period of time, it will have an offset, such as its own rotation,and will not follow its normal trajectory,Is there any way to fix this deviation of MUs by specifying that it only follows the path of the conveyor belt
- I have modified the Rigibody component of MU to limit its rotation
thanks!
 The data obtained by OPCUA interface is not updated for a long time
The data obtained by OPCUA interface is not updated for a long time
The OPCUA interface is used to obtain the data. At the beginning of the data update, the data change information can be obtained, but after a few minutes, the latest data cannot be obtained

Help with model setup
Hello,
I'm trying this simple setup of pushing a MU off a conveyor belt with a pusher or deflector. However, as seen in the video, the pusher moves right through the MU. Please help me to change the settings and understand the reasoning behind the same. I'm using the starter pack and have followed the procedures as per the tutorials to date. So all the settings are set to default, or as suggested in the videos. Thanks for your help!
Hello,
Please make sure that the MUs and the pusher have sufficient colliders. Nevertheless, the elements must be on certain layers: MU --> g4aMU; Pusher --> g4aTransport.(set in the inspector) The current parameter of the collider interaction you'll find here: Edit/Projectsettings/Physics.
Let me know if this solves the issue.
Two Fixer fix MU
Hi
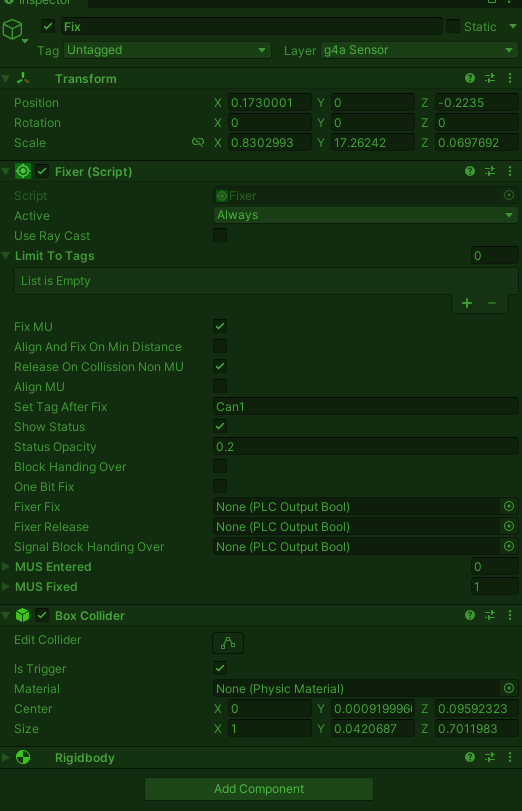
Now,i met a problem about Fixer,I want Fixer1 Fix MU ,and MU is fixed by Fixer,
When i use fixer2 based on Signal release, MU will Drop
When i use release On Collission Non MU, MU cant fixed by Fixer1. It toggles back and forth between captured states
Maybe When release Fix2,Mu maybe drop,and it's been fixed again
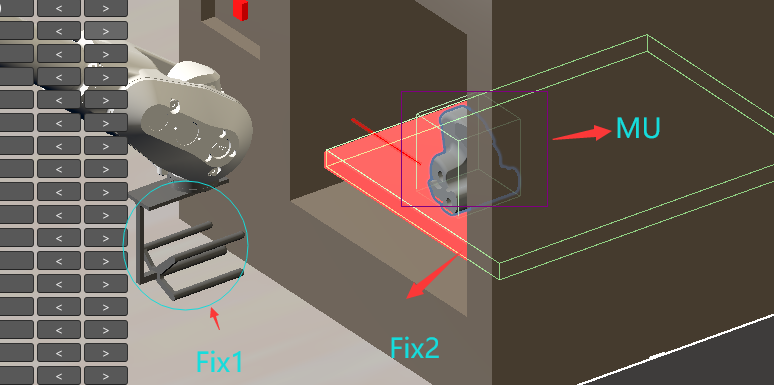
Fixer1
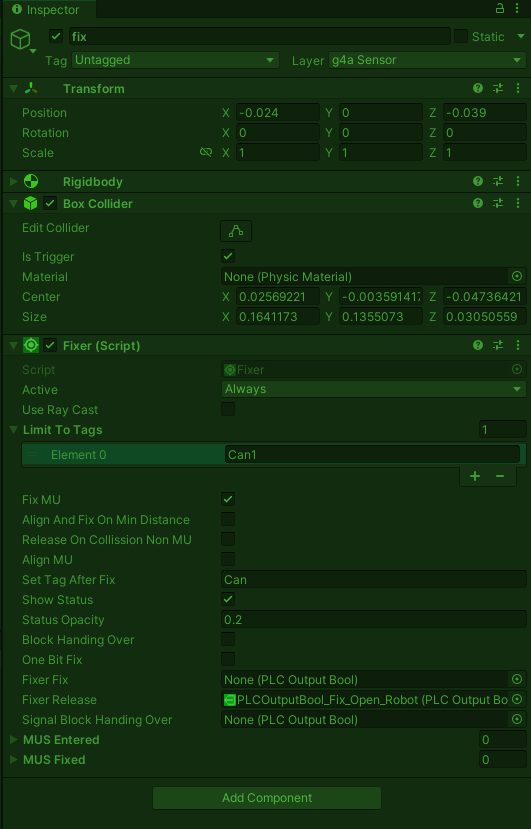
Fixer 2
Robot IK Edit windows Lost
Hi
Today, after I opened the scene, I found that their editing window did not display, such as the path of the robot, joint restrictions of the robot, etc. I exported the project to another computer, and it displayed normally after opening. Meanwhile, I also tried to restart the project, but it didn't seem to work.
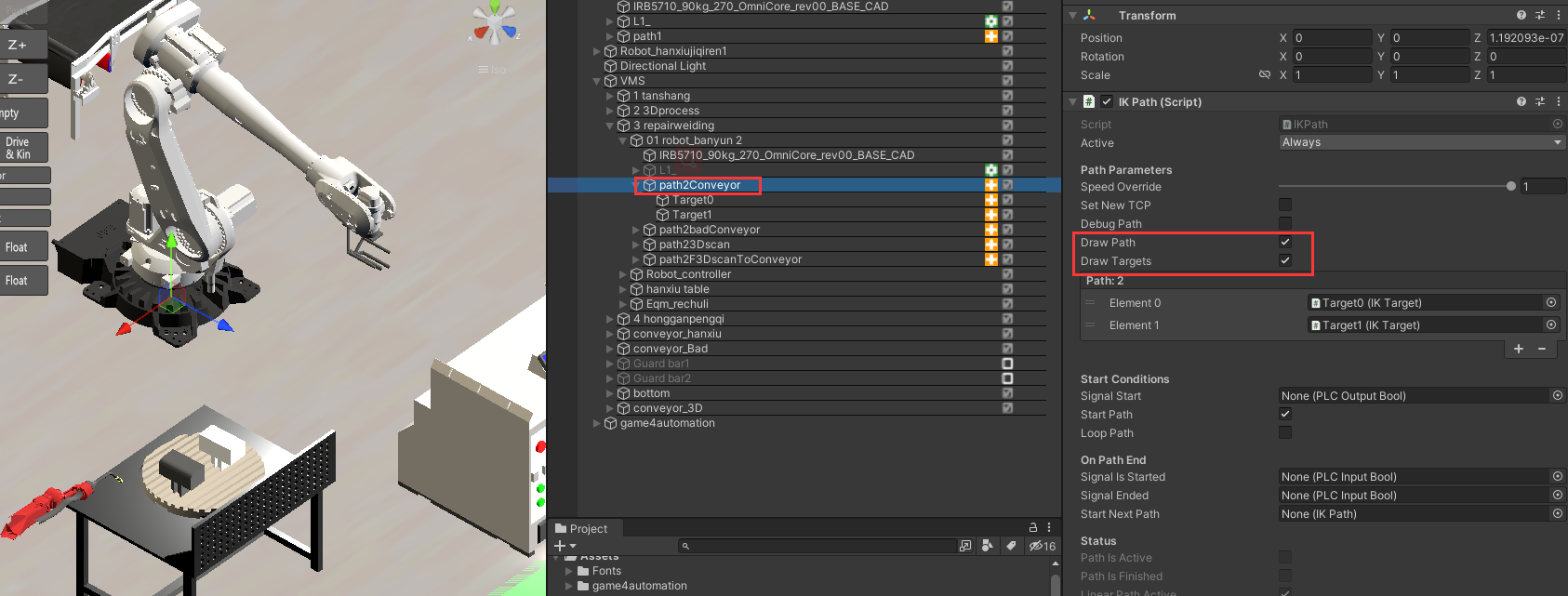
Today
Yesterday.when i click Path,the Path Line show normaly
robot Grip with no finger
Hi
i want to grip MU based on Grip scrip,but my grip have no finger!
i study from standard demo。Based on sensor ,collider,direct grip,etc but i cant realize grip Mu Function
and i study from Grip MUS demo,i found noFingergrip demo,but it realize it based on Gripper Script
Q1:when i want to realize Grip MUs with no Finger,which i should to chose,Grip or Gripper,
Q2:In Grip script,Directly grip,Is it that when MU‘s Box collider and grip‘Box collider collide, i realized grip function?
Q3:Can you give me a detailed instruction document about NoFingergrip based on Grip scripts?
MUS
gripper no fingers
Looking forwaring to your reply!
Customer support service by UserEcho
