Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!

 S7 Connection with TIA V19
S7 Connection with TIA V19
Hi team please update S7 Connection Tutorial in youtube with new TIA19 and if possible update on PLCSIMAdvance v6 too

An error message occurred during WebGL packaging
Hello,
I'm trying to package the webgl project now, but after I deleted the relevant folder as required, the build still gets the error, please how can I fix it.

Building Library\Bee\artifacts\WebGL\build\debug_WebGL_wasm\build.js failed with output:
emcc2: error: '"D:/Program Files/2021.3.32f1c1/Editor/Data/PlaybackEngines/WebGLSupport/BuildTools/Emscripten/binaryen\bin\wasm-opt" --strip-dwarf --post-emscripten --no-exit-runtime -O3 --low-memory-unused --zero-filled-memory --strip-debug --strip-producers Library/Bee/artifacts/WebGL/build/debug_WebGL_wasm/build.wasm -o Library/Bee/artifacts/WebGL/build/debug_WebGL_wasm/build.wasm --mvp-features' failed (3221226505)
UnityEngine.GUIUtility:ProcessEvent (int,intptr,bool&)
BuildFailedException: Incremental Player build failed!
UnityEditor.Modules.BeeBuildPostprocessor.PostProcess (UnityEditor.Modules.BuildPostProcessArgs args) (at :0)
UnityEditor.WebGL.WebGlBuildPostprocessor.PostProcess (UnityEditor.Modules.BuildPostProcessArgs args) (at /Volumes/jenkins1/sharedspace/ra_2021.3/PlatformDependent/WebGL/Extensions/Unity.WebGL.extensions/BuildPostprocessor.cs:179)
UnityEditor.Modules.DefaultBuildPostprocessor.PostProcess (UnityEditor.Modules.BuildPostProcessArgs args, UnityEditor.BuildProperties& outProperties) (at :0)
UnityEditor.PostprocessBuildPlayer.Postprocess (UnityEditor.BuildTargetGroup targetGroup, UnityEditor.BuildTarget target, System.Int32 subtarget, System.String installPath, System.String companyName, System.String productName, System.Int32 width, System.Int32 height, UnityEditor.BuildOptions options, UnityEditor.RuntimeClassRegistry usedClassRegistry, UnityEditor.Build.Reporting.BuildReport report) (at :0)
UnityEngine.GUIUtility:ProcessEvent(Int32, IntPtr, Boolean&)

Unity Physics and Kinematics
I've been using realvirtual.io for a week. But I'm struggling with kinematics links modeling.
As I see in your documentation, you are using either parenting or dynamics on game objects.
The thing is, for certain kinematics chains, neither technique worked...
There is futher example of mechanism i need to model :
There is a way to model complex kinematics chains (Without using mass and force)?

Hi Michael,
There are several approaches you can take to achieve this:
- Position Control via End Element: You can manage the positioning by moving only the endpoint. Although this endpoint is not a real drive, you can connect it to the actual drive using Unity Physics joints. This setup ensures precise endpoint control. While the joints in between might exhibit some shaking, this should not affect the overall functionality.
- Integrated Drives with Gears or CAMS: Another method involves equipping all joints with drives and synchronizing them through the use of gears or CAMs. This setup mimics the movement based on a "Master" Drive, which aligns with the position of the actual drive. For more details, you might find these resources helpful:
- Defining CAMs: Defining CAMs Documentation
- Drive Behavior: Drive Behavior Documentation
- Using Unity Physics for Kinematics: Employ Unity Physics and Unity Joints (details at Unity Joints Documentation) to handle forward kinematics. In cases requiring purely linear movements, consider using Articulation Bodies (Articulation Body Documentation). Be aware that Unity Physics can be somewhat unstable or jittery, which can be mitigated by reducing the Physics fixed timestep at the cost of performance.
For complex scenarios not involving parallel kinematics, which are typically challenging and unstable with Unity Physics, you might explore using AGX from Algoryx (see https://doc.realvirtual.io/extensions/agx-physics9. This is a more robust solution for accurately simulating complex physics interactions, although it is not free and the definition of kinematics is on my point of view more complicated).
In general, whenever feasible, we prefer to resolve these issues using non-physical forward kinematics, whether it’s a straightforward kinematic chain of a robot or something that can be easily managed with defined cams or gears.
I hope this helps! Let me know if you need further assistance.
Best,
Thomas

Adding kinematics on pendulum like Object
 Model-Pose1
Model-Pose1
Yesterday, I tried to dive deeper into the kinematics of more "complex" objects in Unity. However, I reached my limits when working on the kinematics of the model in the attached image, and I wanted to ask for your assessment of the complexity involved.
From my experience, chaining linear and independent movements doesn't seem to be a problem. However, combining rotational and linear movements appears to be more complex.
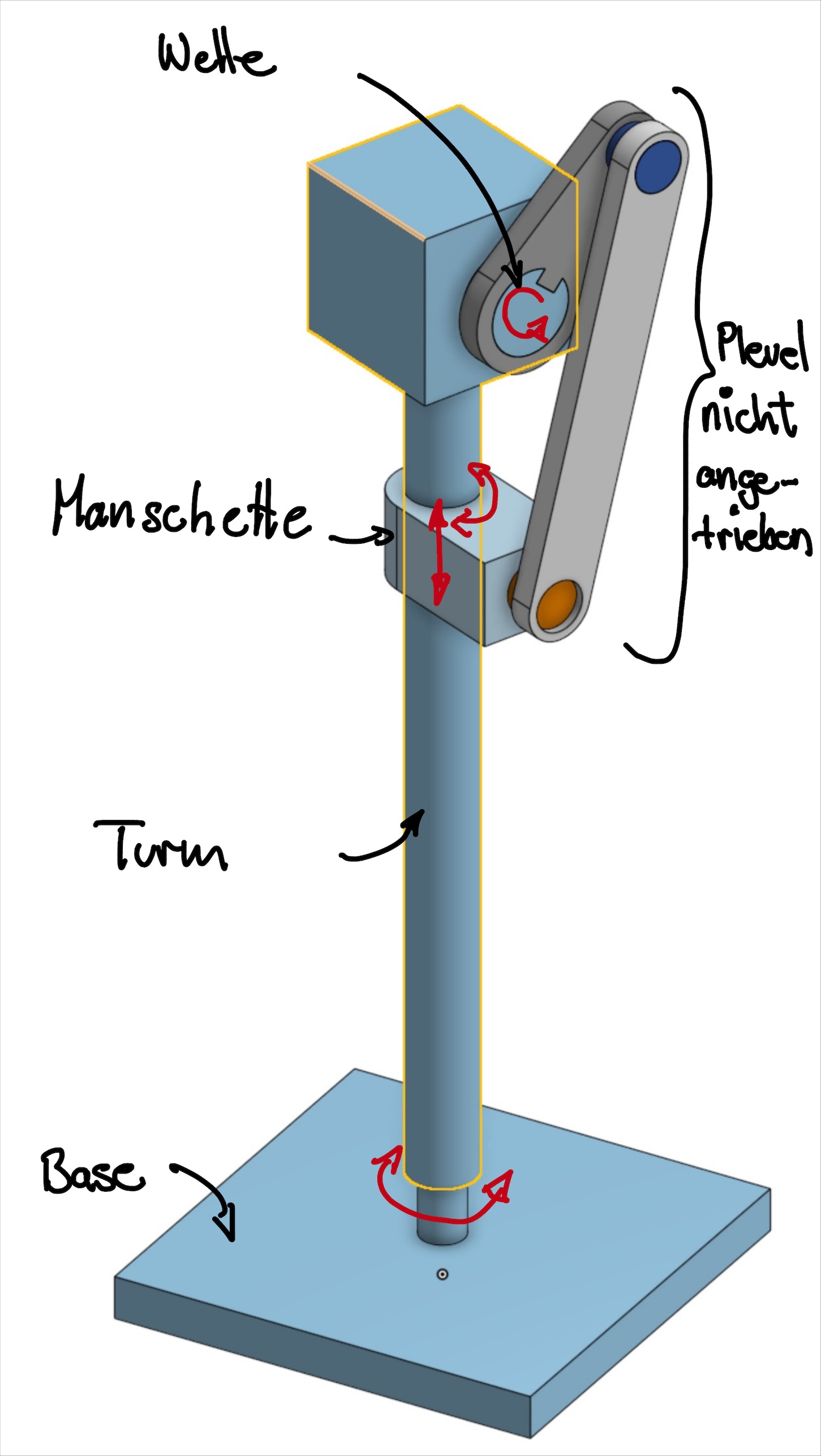
The model is actually a relatively simple construction. On a base-plate, there is a rotatable and driven turret. At the top of this turret, there is a shaft driven by a motor, which, through a connecting rod-like mechanism, is supposed to exert a linear movement on the "sleeve" around the turret. I have illustrated this with two images.
I have tried various combinations of kinematic chains and also tested the use of Unity's internal joints like the "Hinge Joint." I always got to the point where I still needed to add the linear movement of the sleeve. However, I couldn't implement this final step under the conditions of the existing movements.
In general, I have the following questions:
- Is it possible to use the joints provided by Unity in combination with the drives from Realvirtual?
- Are there any similar "joints" from Realvirtual that constrain kinematic movement (i.e., without additional drive)?
- I had the feeling that a functioning kinematics heavily depends on the hierarchical arrangement of the game objects. It seems that the linear constraint of the sleeve to the turret doesn't work due to the hierarchy. Do you have any tips or rules that need to be followed, and is such a kinematic chain as desired in the model even possible?
I have also attached the STEP file of this model and would appreciate any feedback.
We recognize that despite the significant changes made in the last release to ensure the drive fixed update sequence for cams and gears, there is still a bug affecting functionality.
After investigation, we have identified the solution. To resolve this issue, please modify the Drive script by adding !issubdrive around line 880. This fix will also be included in our upcoming release.

how to use the interface for commands?
I want to interface the realvirtual digital twin with a c# application. The c# application already exists and controls resources like motors with resource commands. The commands are already expressed in a message that is send via TCP. No PLC is used.
An example message would be:
- message type -> eg resource command request
- object id -> eg Xaxis
- command id -> eg move
- parameters -> eg position, speed, acceleration and deceleration parameters
The individual parameters in the message are extracted from the message by a decoding procedure.
I would like to use an industry standard like MQTT (or OPC UA) to interface with the digital twin. Therefore the TCP message has to be converted to a MQTT message.
I have limited knowledge in this area, but from what I understand is that the digital twin requires signals. Drive_DestinationMotor for example requires 5 PLC outputs and 4 PLC inputs, the PLC outputs/inputs should be mapped to signals, signals should be connected to MQTT topics, each MQTT topic represents 1 signal. Am I right?
I can understand how to convert the TCP message to multiple MQTT messages, but how can I make sure that parameters like position and speed signals are received all at once or before the actual "start drive" signal?
Are there examples available on how to do this or should I use a different approach? What would happen when I replace Drive_DestinationMotor by a controller with states? Are there examples of such a controller?
Digital Twin Professional 2021 mit Simulation 2022
Hallo,
wie kann ich die oben genannten Pakete noch nutzen?
Ich habe die Assets direkt über unity gekauft im Dezember 2022.
Wenn ich jetzt ein frisches Projekt anlege (aktuelles Unity 2021 LTS) bekomme ich haufenweise Fehler.
Ask some questions about using Drive Component
Hello
I have a requirement to reproduce the gripping and placing of a SCARA robotic arm. My current idea is to divide the model into joints and add Drive components to the axis position of each joint, so that it can be moved, so as to achieve the process of motion restoration. But when I use the rotation function of the drive component, I find that it can only rotate all the time, can I set an angle for the drive component to rotate only the angle I set?
Or can you see if there is a better way to simulate the movement of a SCARA robot?
I don't need to add complicated IK algorithms, I just want to give the rotation angle of each axis of the SRACA robotic arm and let it rotate to the target position.
Thanks
Hi, you need to add a Drive behavior (https://doc.realvirtual.io/components-and-scripts/motion/drive-behavior) to the drive e.g. a Drive_DestinationMotor to control the drive and to send it via signals to certain destination position for each axis. Alternatively you could control the Drive via a script and use the Method Drive.DriveTo(float destination) of the Drive.
 PLCSimAdvancedCoupler startet bei Simulation nicht
PLCSimAdvancedCoupler startet bei Simulation nicht
Hallo Thomas,
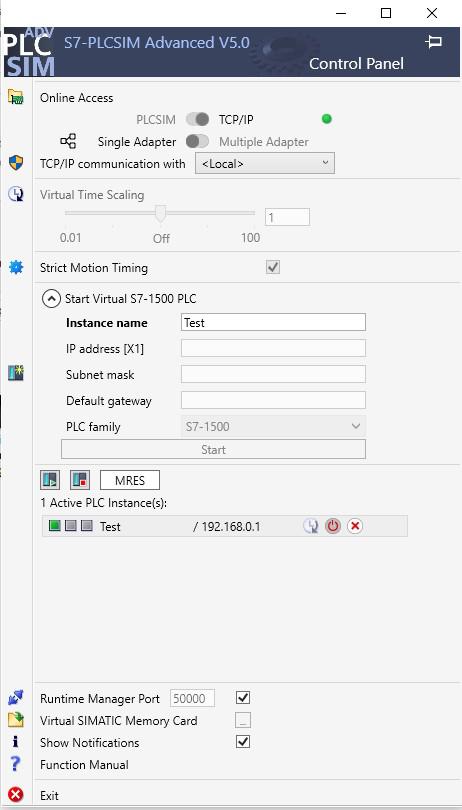
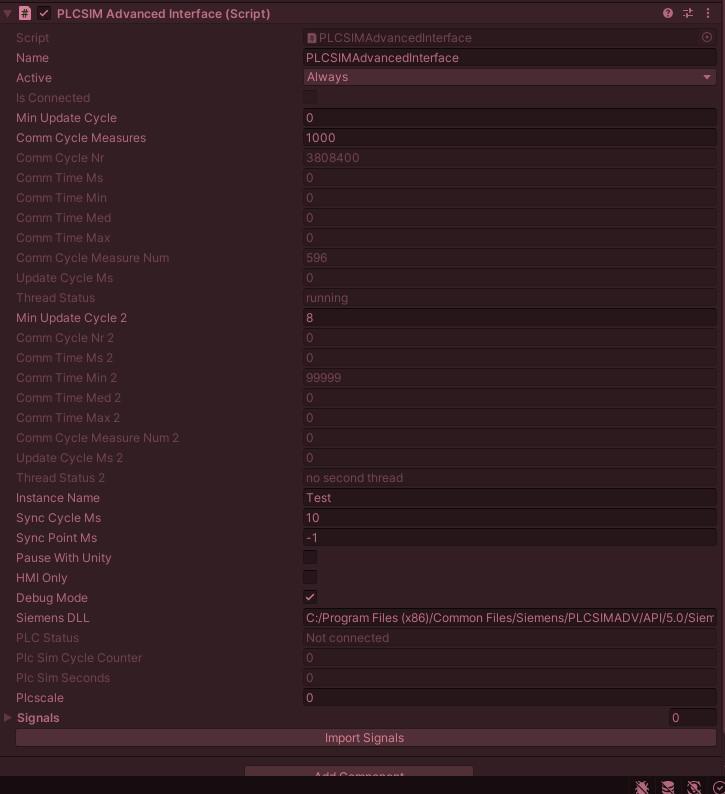
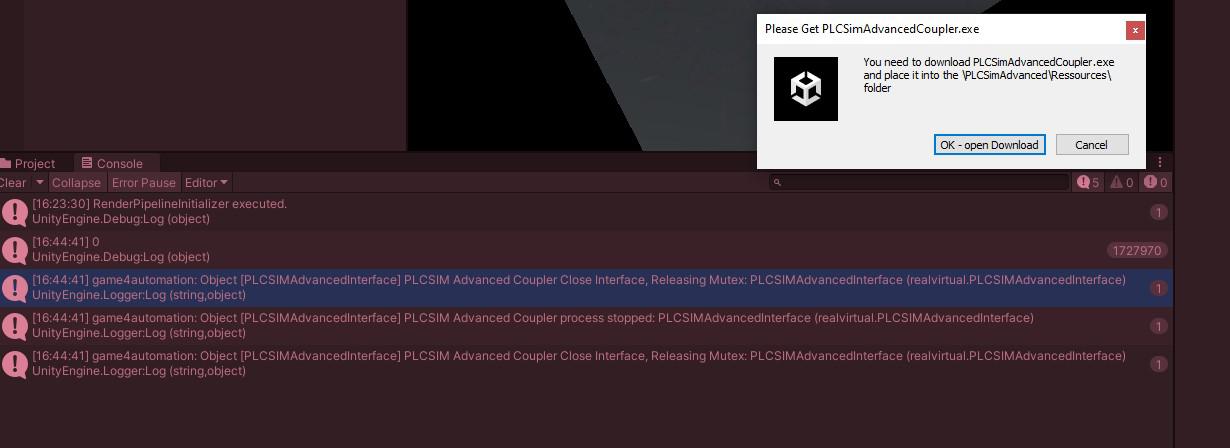
ich bekomme keine Verbindung von Unity zu PLCSimAdvanced V5.0. Bei Simulationsstart kommt jedes mal die Fehlermeldung (in Unity):
"You need to download PLCSimAdvancedCoupler.exe and place it into the \PLCSimAdvanced\Ressources\ folder"
Die genannte .exe habe ich im in meinem Projekt - Ablageordner unter:
C:\Unity Projekte\Zuluftanlage\Assets\realvirtual\Interfaces\PLCSimAdvanced\Ressources
abgelegt. Dennoch scheint Unity die .exe nicht zu finden. Auch die "Siemens.Simatic.Simulation.Runtime.Api.x86.dll" hab ich im entsprechenden Ablageordner für PLCSimAdvanced V5.0 abgelegt unter:
C:\Program Files (x86)\Common Files\Siemens\PLCSIMADV\API\5.0
Was ich weiter versucht habe ist:
- deinstallieren von "Npcap 1.71" und installieren von "Npcap 1.79"
- bilden einer Instanz in PLCSimAdvanced mit Konfiguration PLCSIM sowie TCP/IP
- deaktivieren der Windows - Firewall
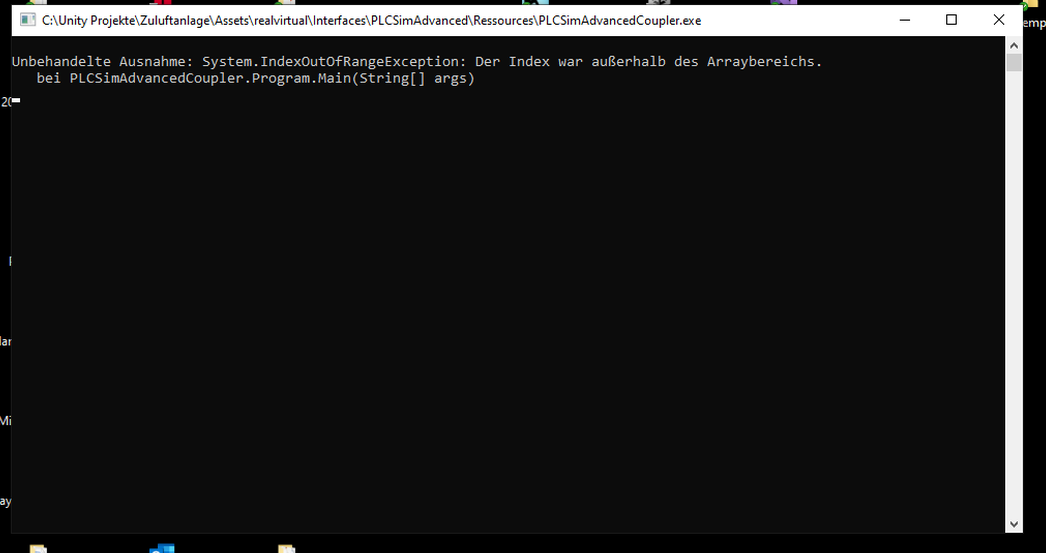
- starten der PLCSimAdvancedCoupler.exe manuell (Fehlermeldung siehe Screenshot!)
Geladen wurde die PLCSimAdvanced Instanz mit TIA Portal V18. Anbei befinden sich ein paar Screenshot.
Viele Grüße
David

Stop MU on conveyor by stopper
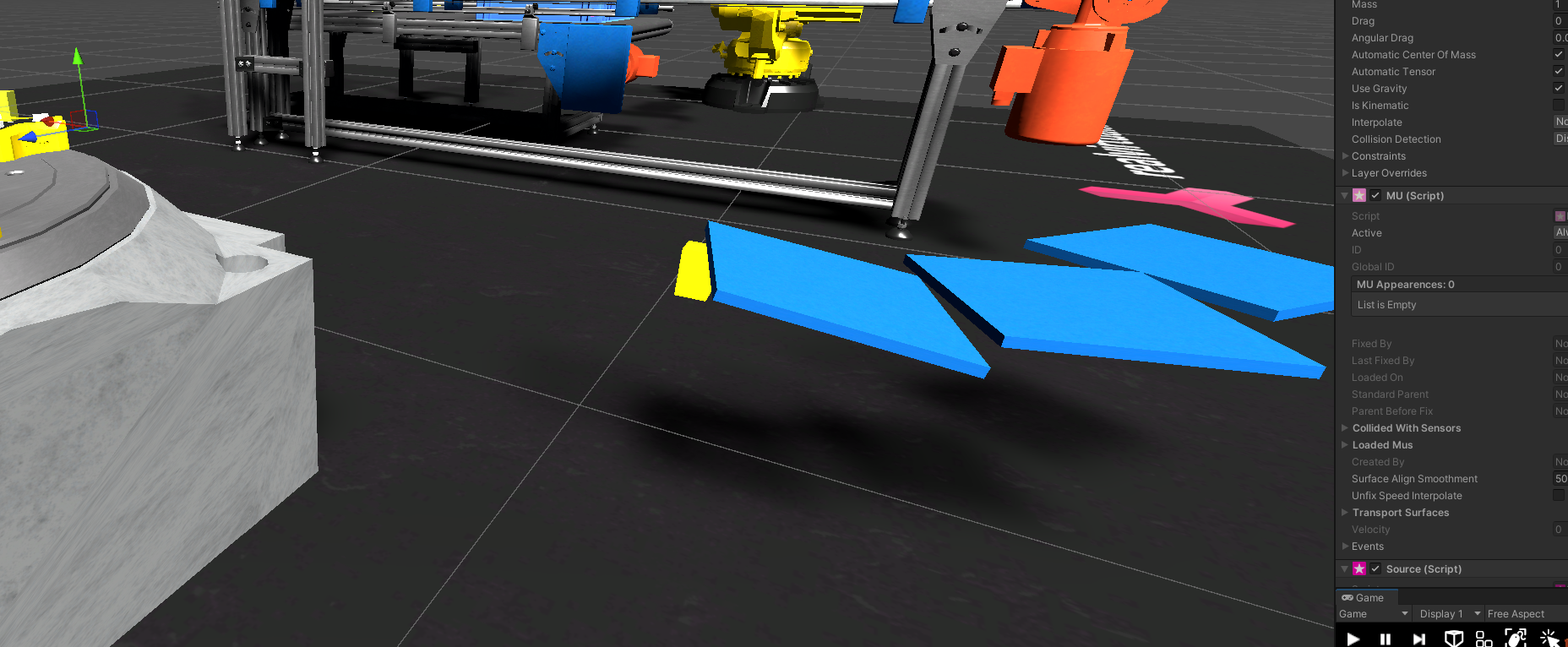
How can I prevent a jumping MU on a (guided) conveyor?
For this I used the invisible conveyor system from your demo project "Guided Transport".
The MU stops at the stopper but starts jumping up and down immediatetly.
Is there an easy way to prevent this?
I played around with the Rigidbody parameters and realised it stops if I activate "Is Kinematic". I guess I could do this by writing a scripts that activates this parameter at collision with transport layer.
Hallo,
anbei die Antworten zu Ihren Fragen:
Im Umlaufsystem stapeln sich die WTs ab einer Staulänger von 4 Wts. Wie kann ich das verhindern?
Bitte verwenden Sie ausschließlich guided Transport. Die Kombination aus normaler Transportsurface und guided Transport wird nicht funktionieren.
Wie kann ich ein "Transport Guided (Script)" unterbrechen (durch zB einen Heber) und danach wieder fortführen?
Hier gibt eine Umsetzung in der Demoszene zum guidedTransport, welche als Vorlage genutzt werden kann. (realvirtual/Scenes/DemoGuidedTransport)
Wie kann ich eine "Guideline" bei einem Transportsystem mit zwei "Transport Surfaces" einfügen?
Ein System wie in ihrem Beispiel wird immer nur mit einer Transportsurface umgesetzt, damit kann einfach eine Guideline ergänzt werden. Unity betrachtet immer nur eine "Collision".
Unter main/realvirtual/ui/button1 wird ein image verwendet. Wo finde ich die Datei?
Button-GameObject in der Hierarchie auswählen und im Inspector auf das definierte Bild klicken. Es wird dann im Projekt angezeigt.
Roboter bewegen sich zu bestimmten Positionen deutlich langsamer. Warum ist das so?
Die Bewegung richtet sich nach der langsamsten Achse.
Grüße Christin
Use only guided transport. Combining normal transport surfaces with guided transport will not work.
There is an implementation in the demo scene for guided transport that can be used as a template. (realvirtual/Scenes/DemoGuidedTransport)
A system like the one in your example is always implemented with a single transport surface, allowing an easy addition of a guideline. Unity only considers one "Collision".
Select the Button-GameObject in the hierarchy and click on the defined image in the Inspector. It will then be displayed in the project.
The movement speed is determined by the slowest axis.
Regards Christin
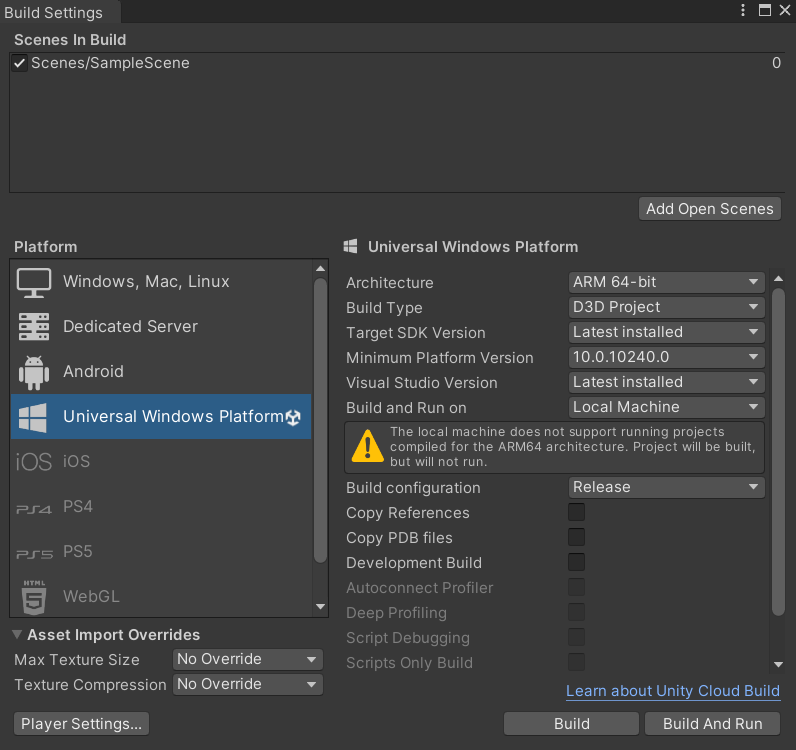
UWP Deployment for Hololens 2 does not complete successfully Unity 2021.3.21f1
Hello, it seems like we are having an issue with the OPCUA4Unity asset that we want to use for our Hololens build. We created a new project and were able to create a build for the Hololens without any problems. We then imported the asset from the Asset Store and tried to build again, but to no avail. We didn't add the demo scene into the build, so the problem is not with the scene itself. The build settings match the attached screenshot.
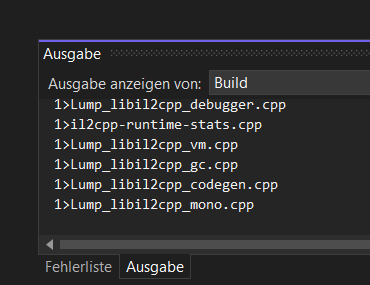
After creating the build in Unity, we open the build folder in Visual Studio and launch the .sln file. We select the Release, ARM64 and Device options and start the process. However, the build process gets stuck at a certain point, as shown in the screenshot.
Customer support service by UserEcho
